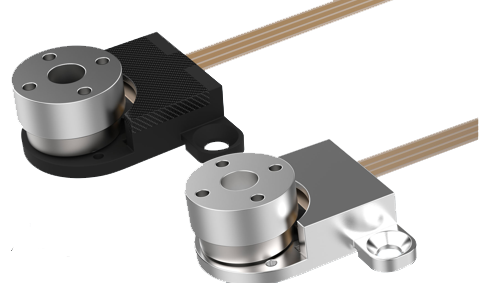
Miniature Piezoelectric Rotary Actuators ROMO, ROMO-E, ROMO-E-CL
Motion Control Options
Piezo Motor Company’s rotary motors are available with or without factory-fitted encoders. Fully closed-loop systems are also available:Motion control is achieved using the electronic driver board, designed to offer an economical interface for user control.
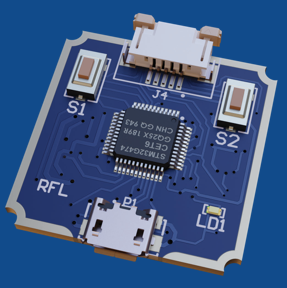
Electronic Driver Board Interface Supports UART & I2C
The driver PCB supports UART and I2C interfaces, enhancing its adaptability. Each board is pre-programmed for the specific motor model, allowing for software configurability, optimizing drive signals, and integrating controls. Motor operation can be finely regulated by user through closed- loop control with an optional encoder installed on the motor/actuator.
Closed-loop Systems with Python API
PMC’s new Python API allows for feedback from the piezomotors’ encoder to be fed to the driver board, closing the loop. The position and speed of the motor can be controlled through an elaborate set of Python API commands, accessible via the MicroUSB port.
Performance and Benefits of ROMO Series Rotary Actuators
- New US patented design
- Superior stability of velocity control
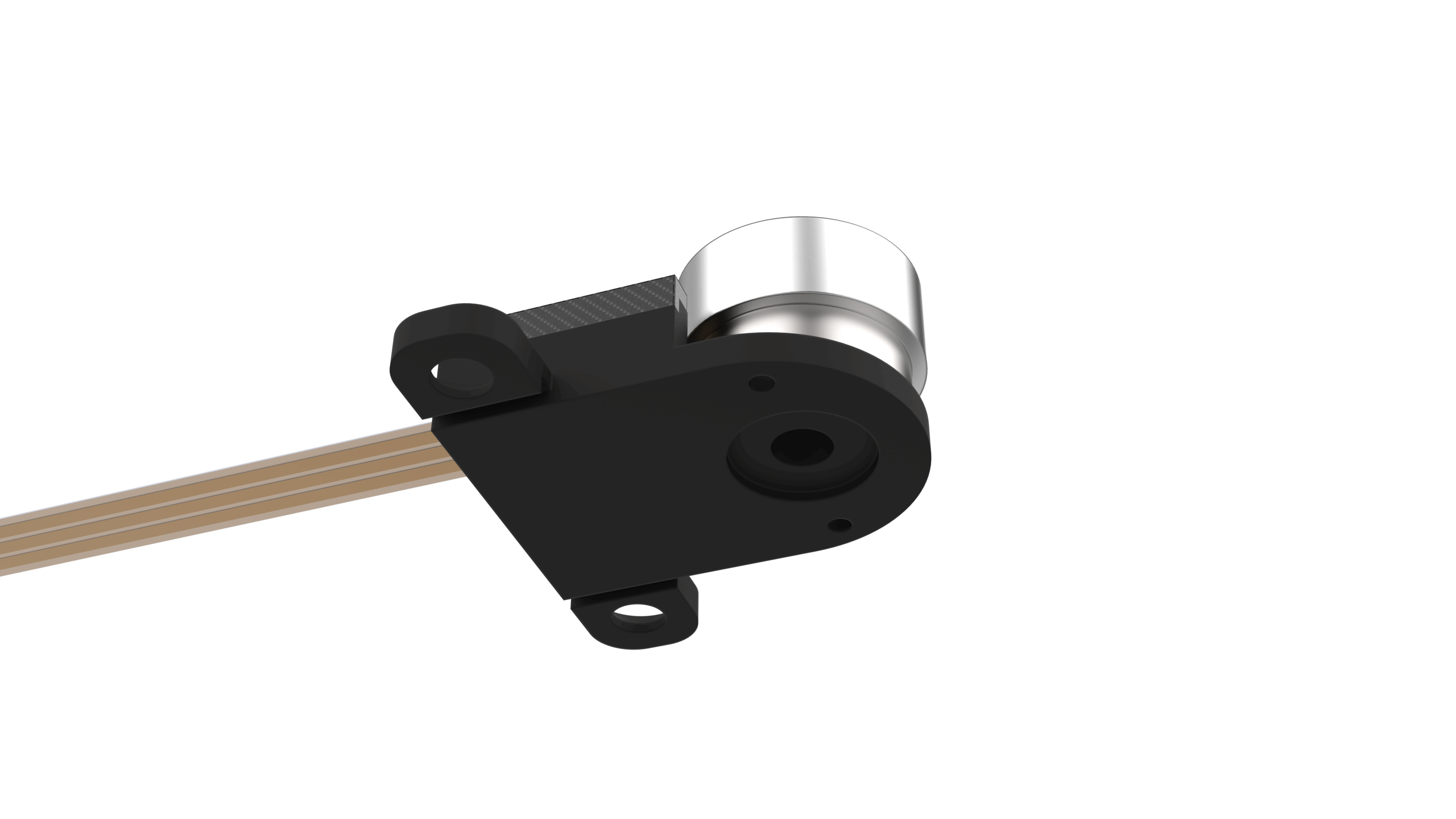
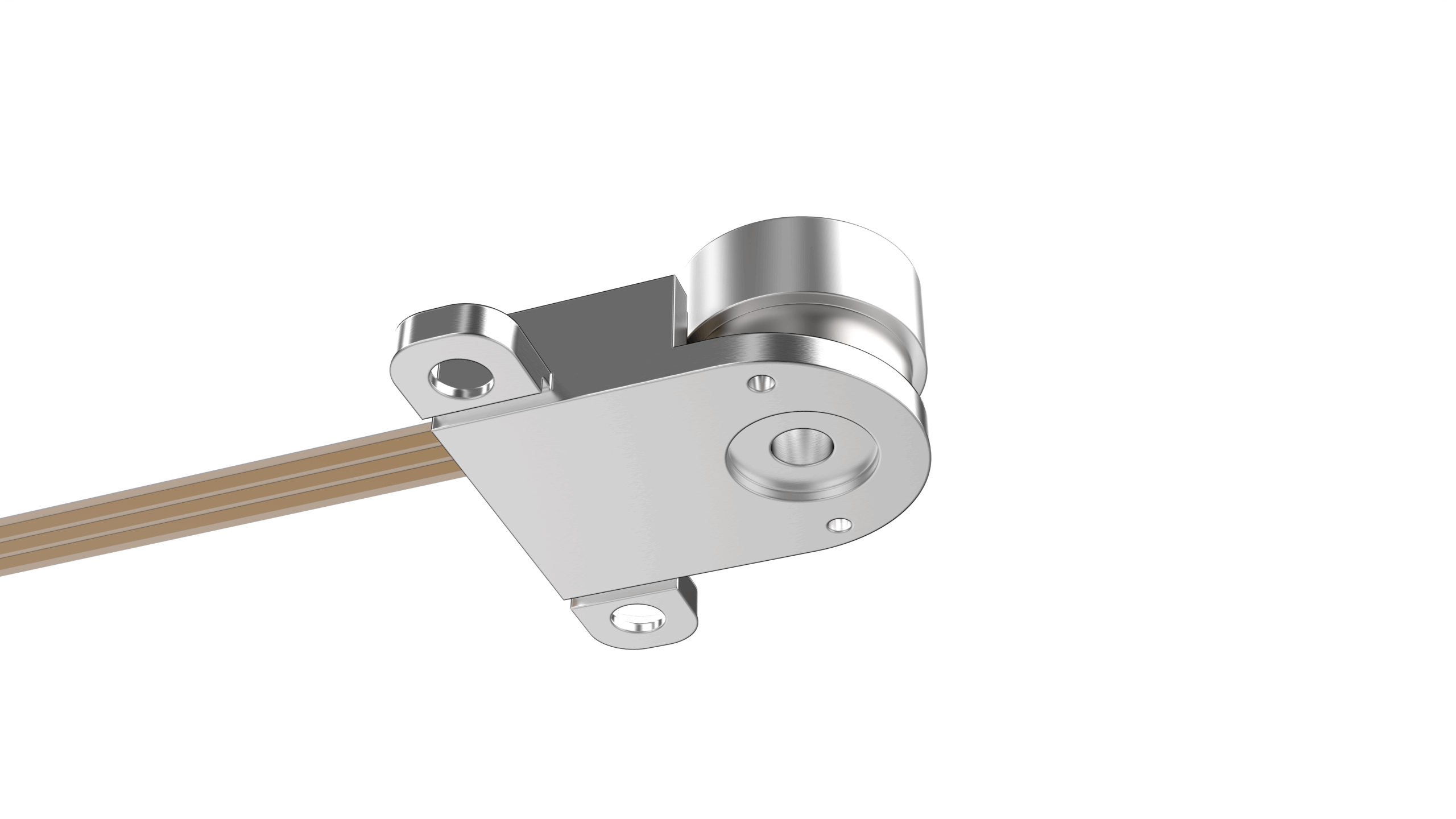
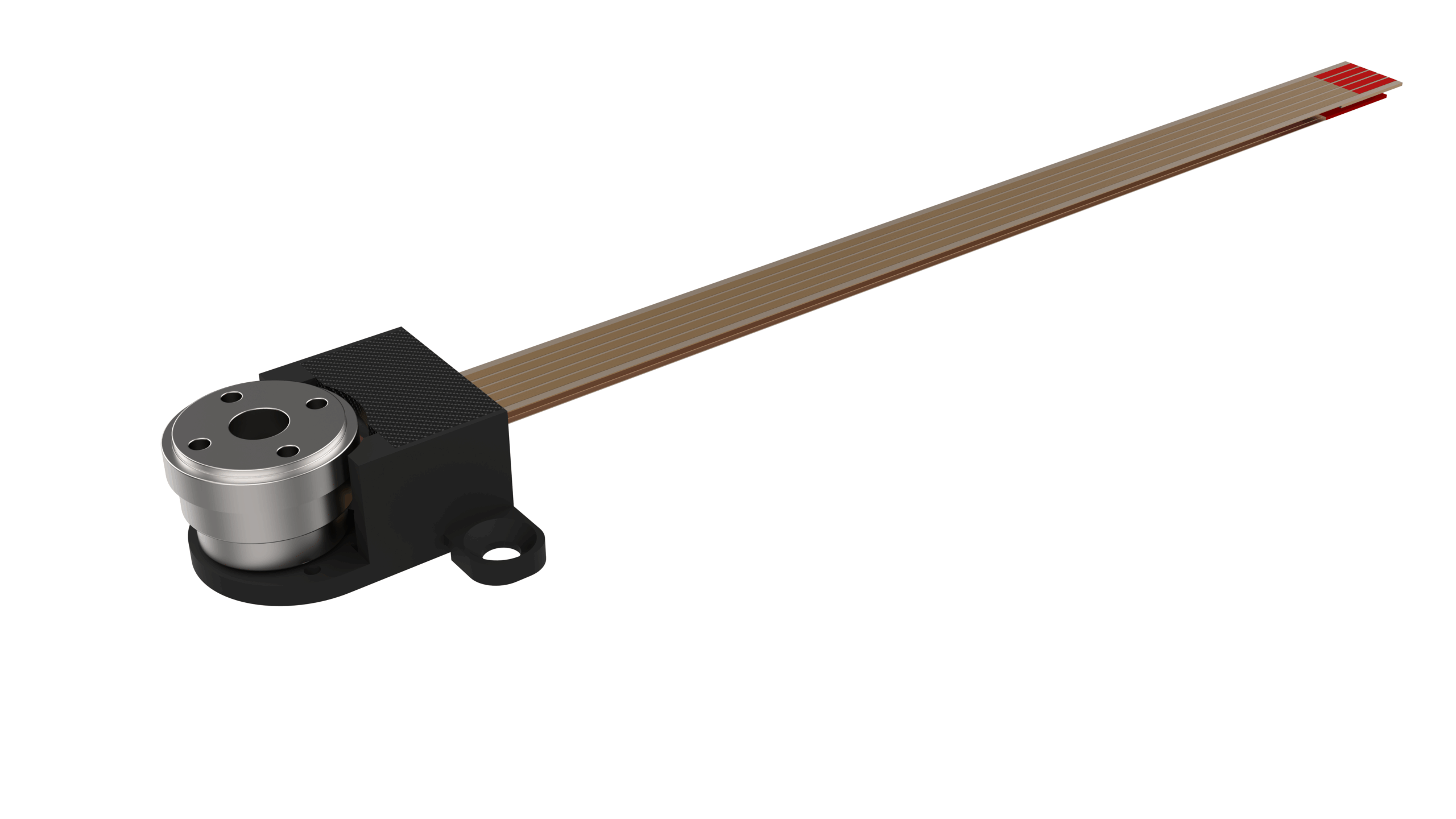
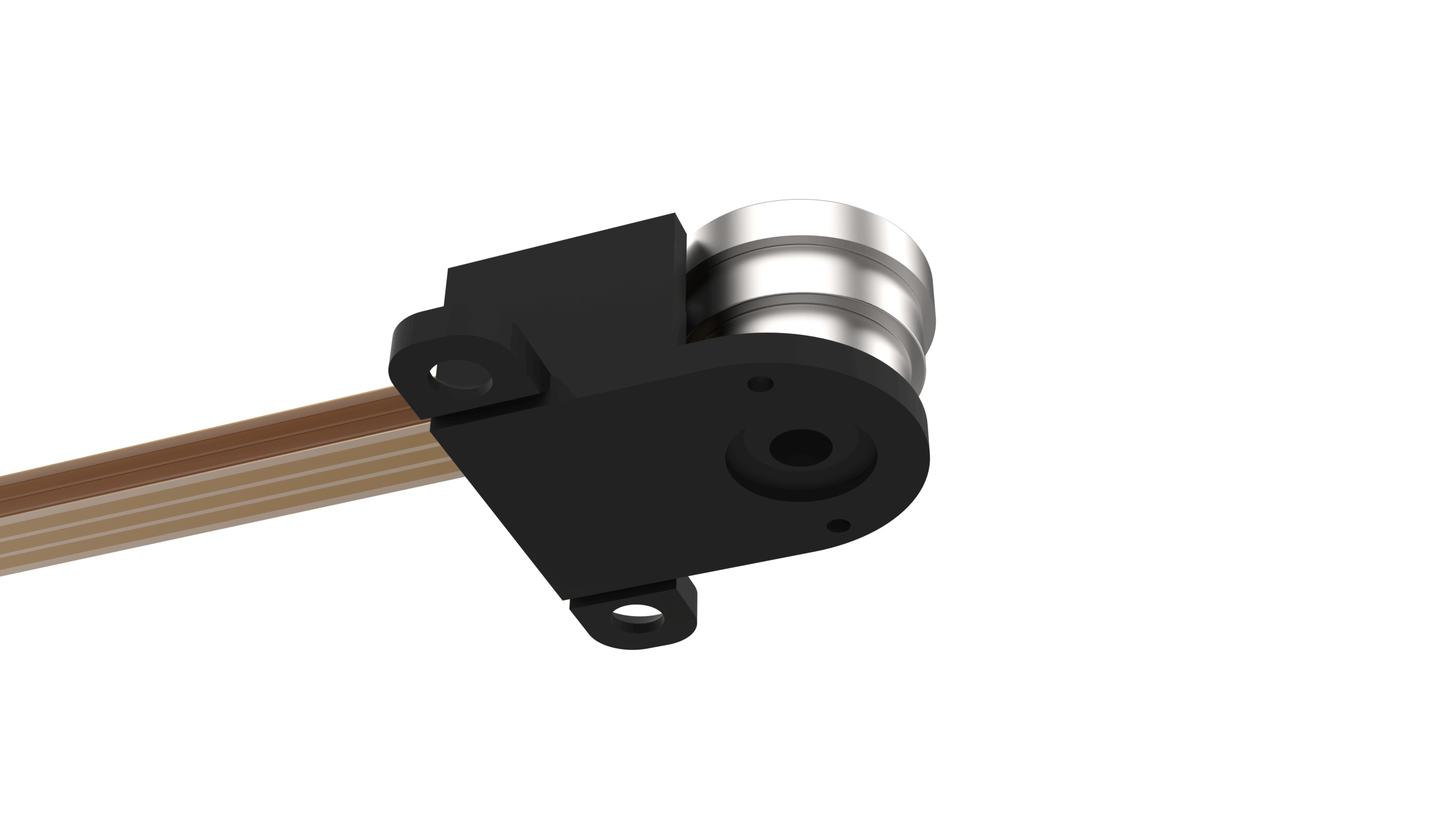
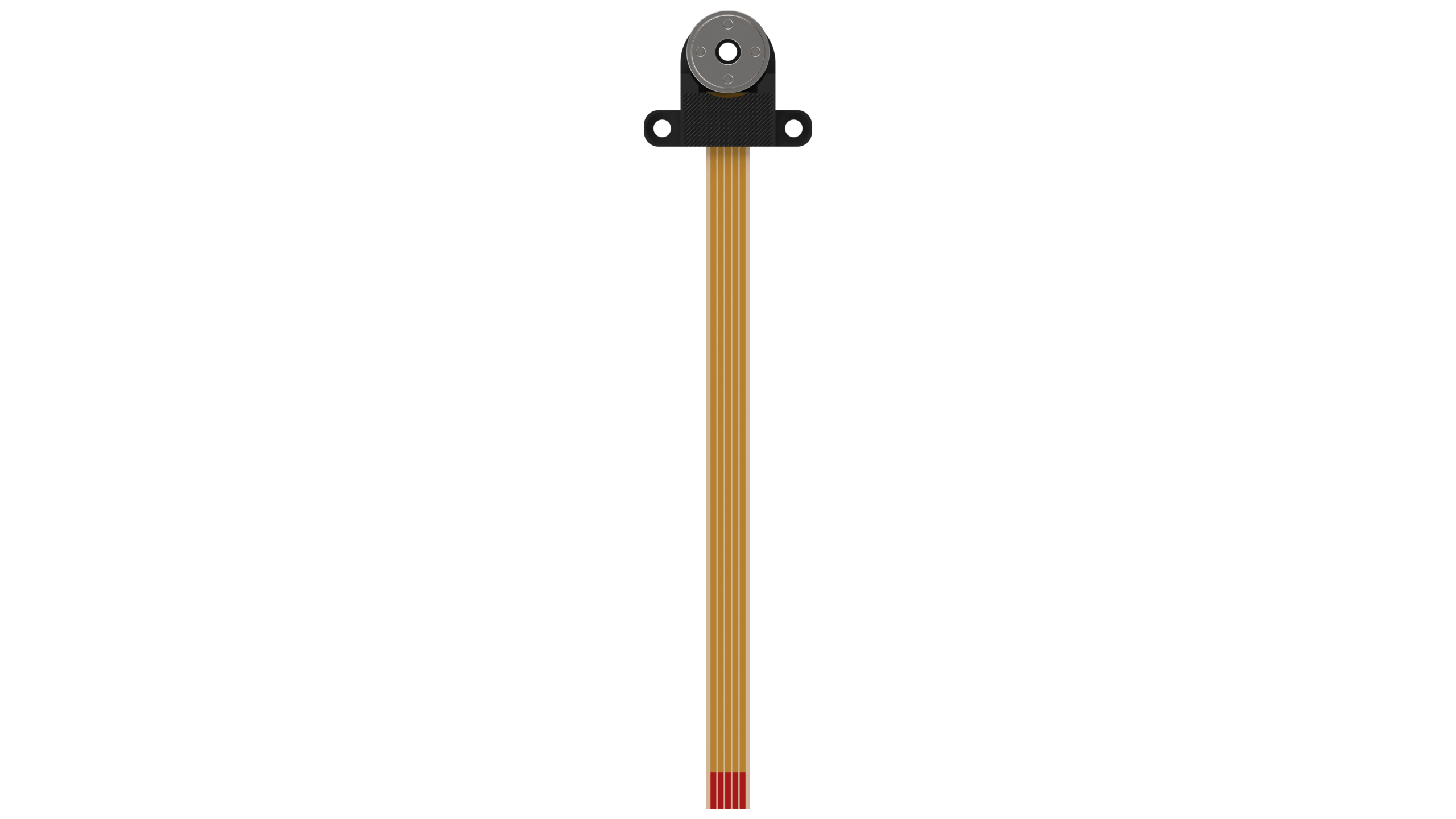
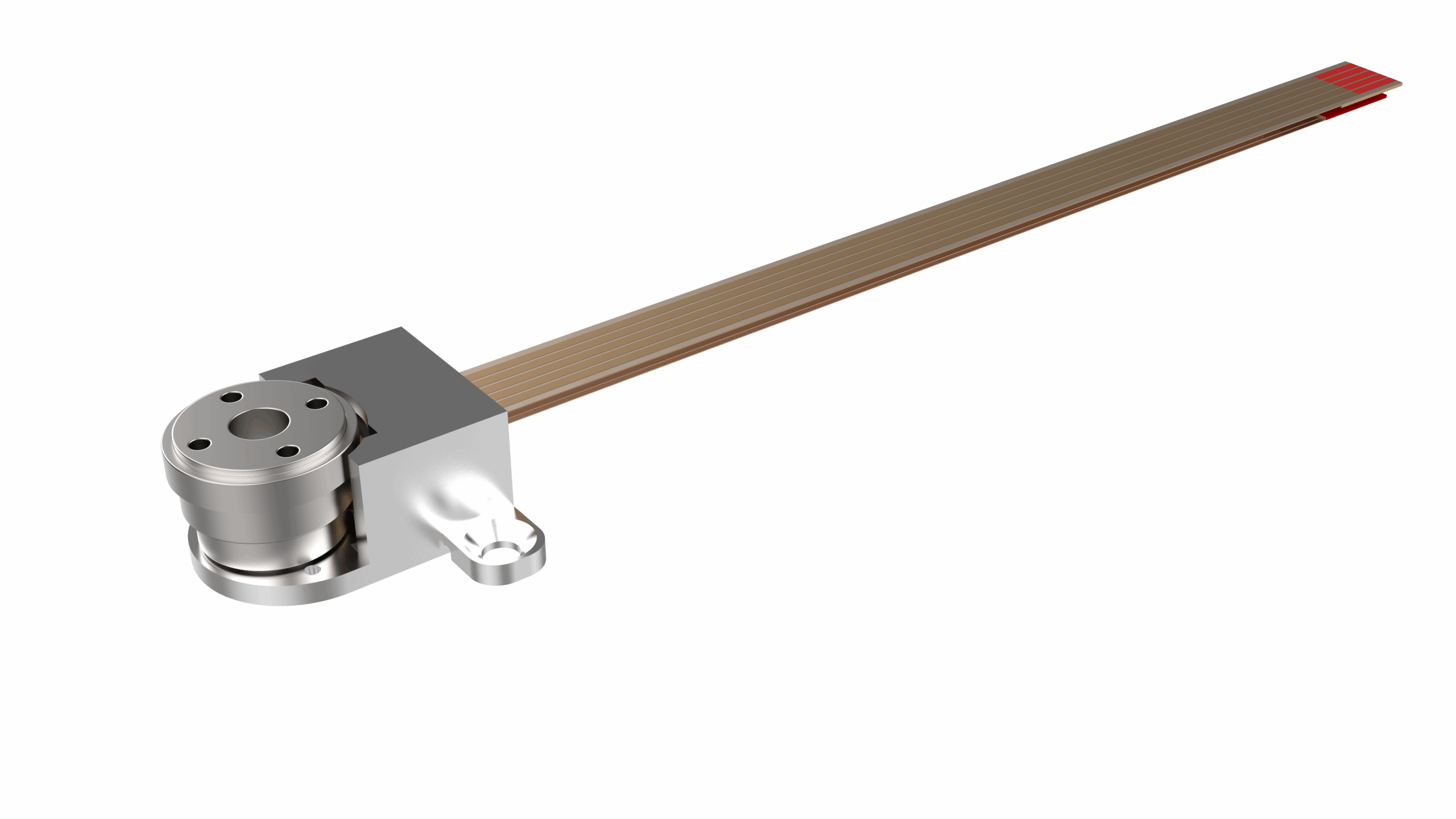
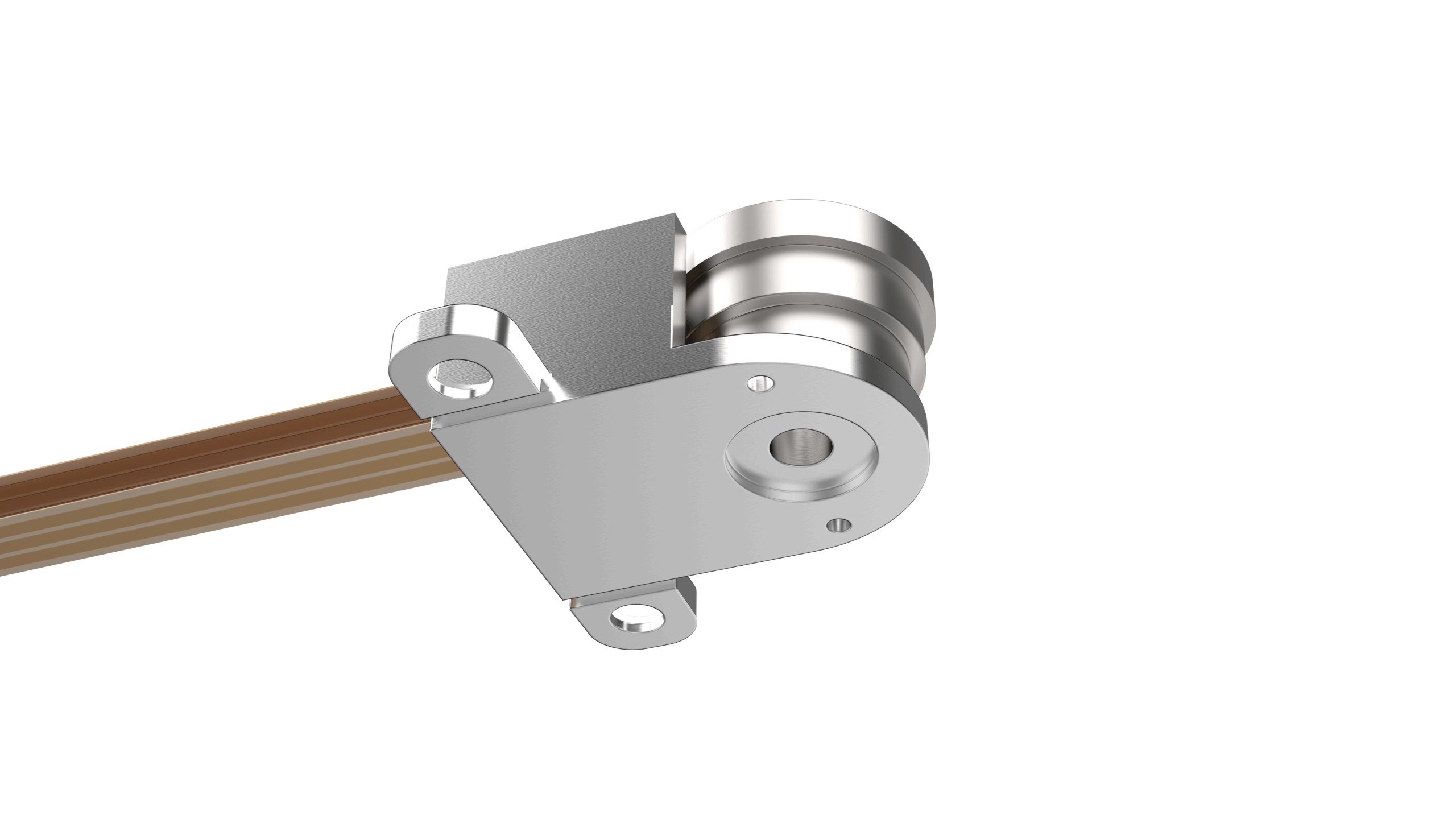
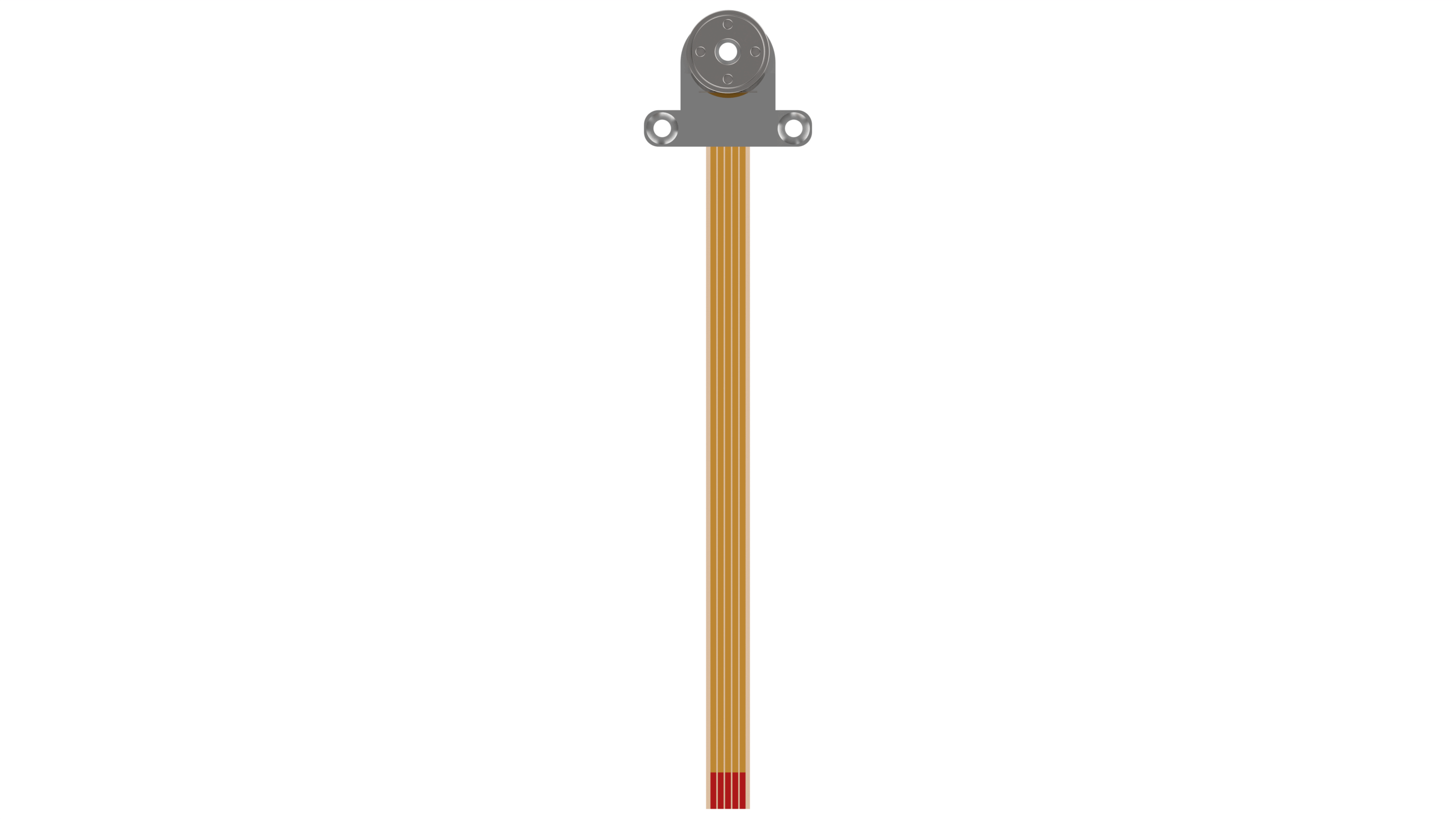
- Flexible PCB electrical connection facilitates system integration
- Economical construction using thermoplastics or machined metal for reliability and affordability
- Unmatched precision and resolution
- Ultra-fast response times and exceptional start-stop capabilities
- High torque relative to size, optimized for direct-drive applications
- Stepping and continuous modes of operation

ROMO Series Motor Specifications
Model No.s Plastic or Metal Enclosures | ROMO (Plastic) ROMO-M (Metal) |
| Power Supply Voltage* | 5.0 to 7.5 V DC Note 1 |
| Stall Torque | ≥ 4 mNm |
| Self-Braking Torque | ≥ 5 mNm |
| Actuator Response Time | ≈30 µs |
| Max Speed | > 600 rpm |
| Minimum Angular Step | ≈30 µrad |
| Angular Backlash | 30 µrad |
| Angular Hysteresis | 30 µrad |
| Frequency Response | 4 kHz |
| Minimum Controlled Angular Step** | 6.1 mrad Note 2 |
| Uni-directional Repeatability** | 6.1 mrad Note 2 |
| Operating Temperature | -20 °C to 80 °C |
| Maximum Axial Load | 200 g |
| Maximum Radial Load | 200 g |
| Moment of Inertia | 29.2 g·mm² |
| Max Current over velocity range | 30 mA to 300 mA |
| Rotor Runout | ≤50 µm |
Actuator Weight (Plastic or Metal enclosure) | 3.5 g or 4.0 g (metal) |
| Actuator Dimensions (no shaft) | 13 x 18.7 x 9.1 mm |
| Driver PCB Dimensions | 28 X 31 X 9.6 mm |
| Driver PCB Weight | 4.3 g |
Note 1: *At 5 V DC power – specifications for torque and speed will be approximately
25% lower compared to 7.5 V DC.
Note 2: **Motor model with factory fitted encoder.
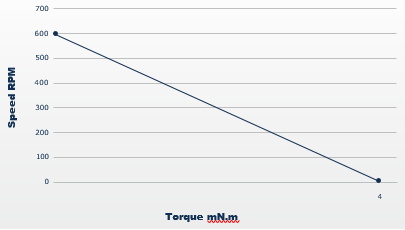
ROMO TORQUE CURVE
Principle of operation
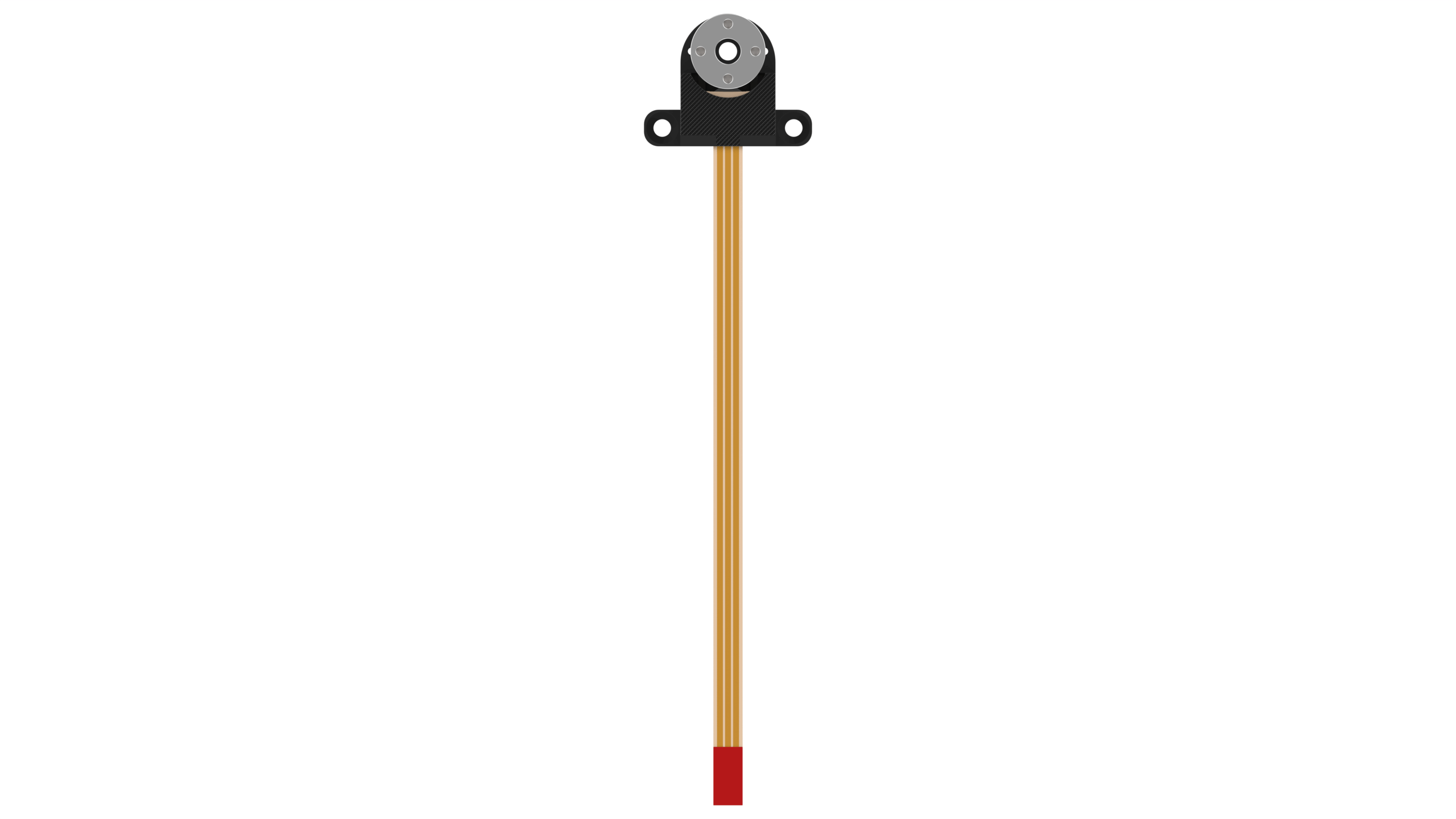
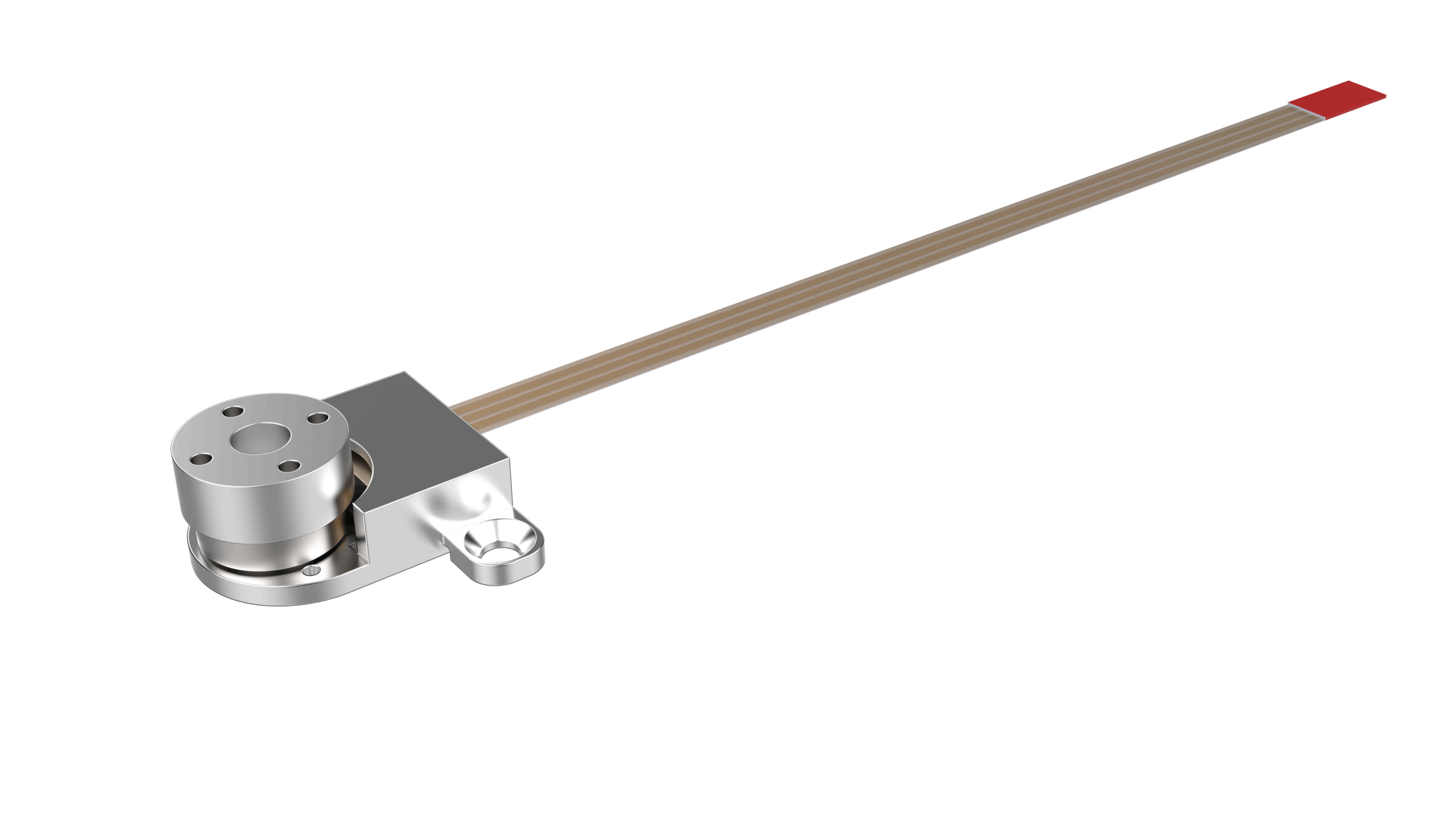
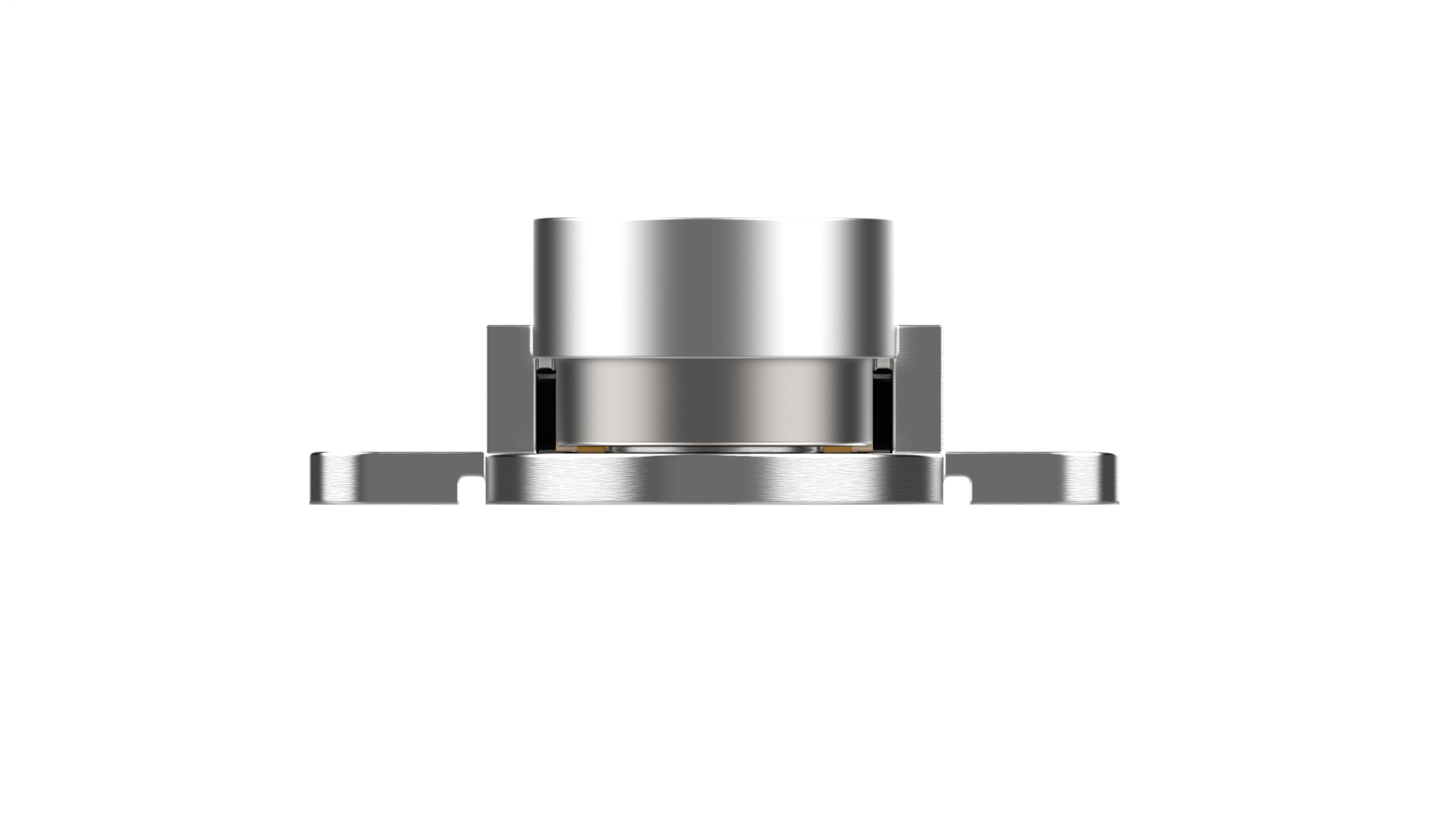
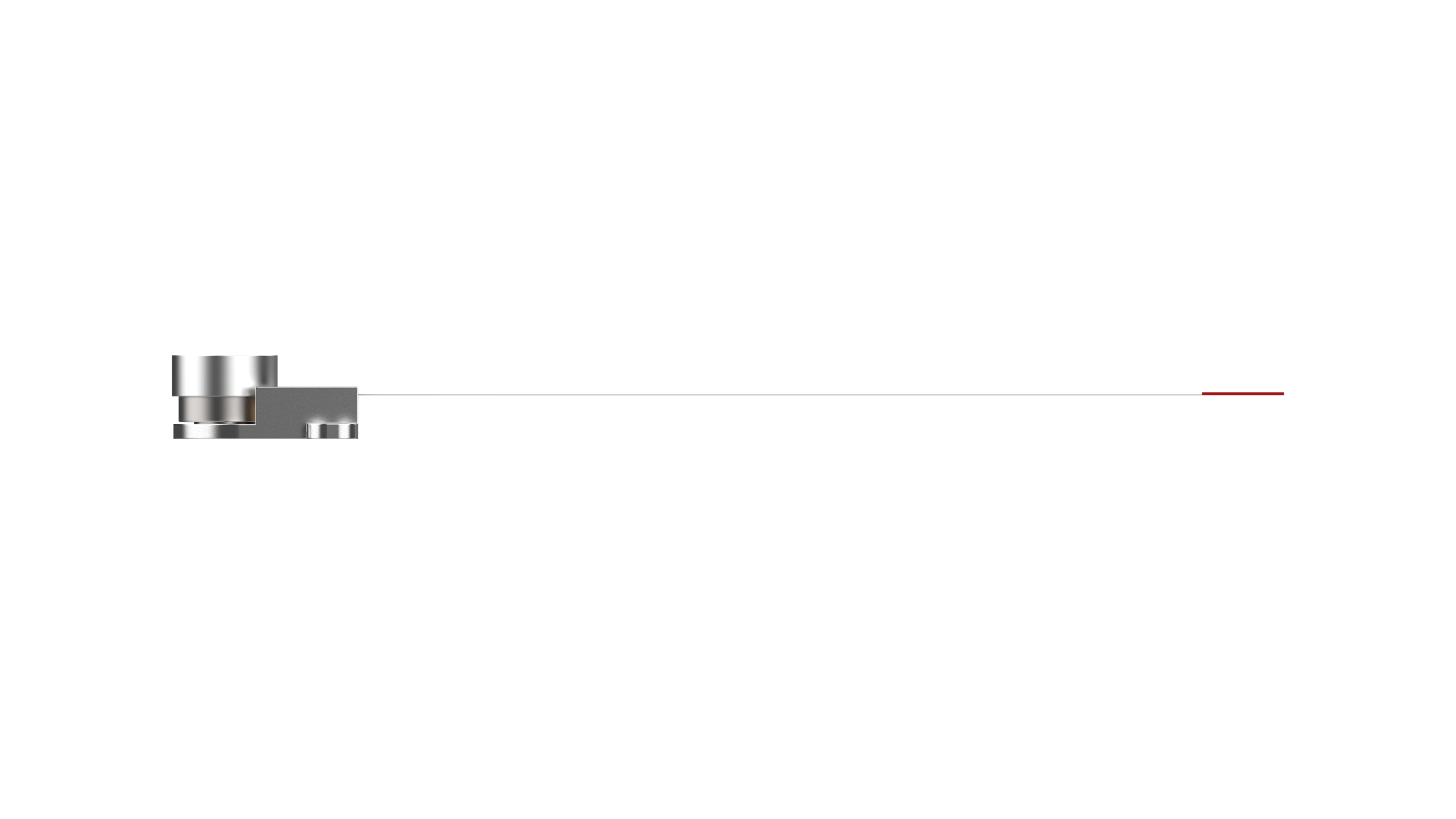
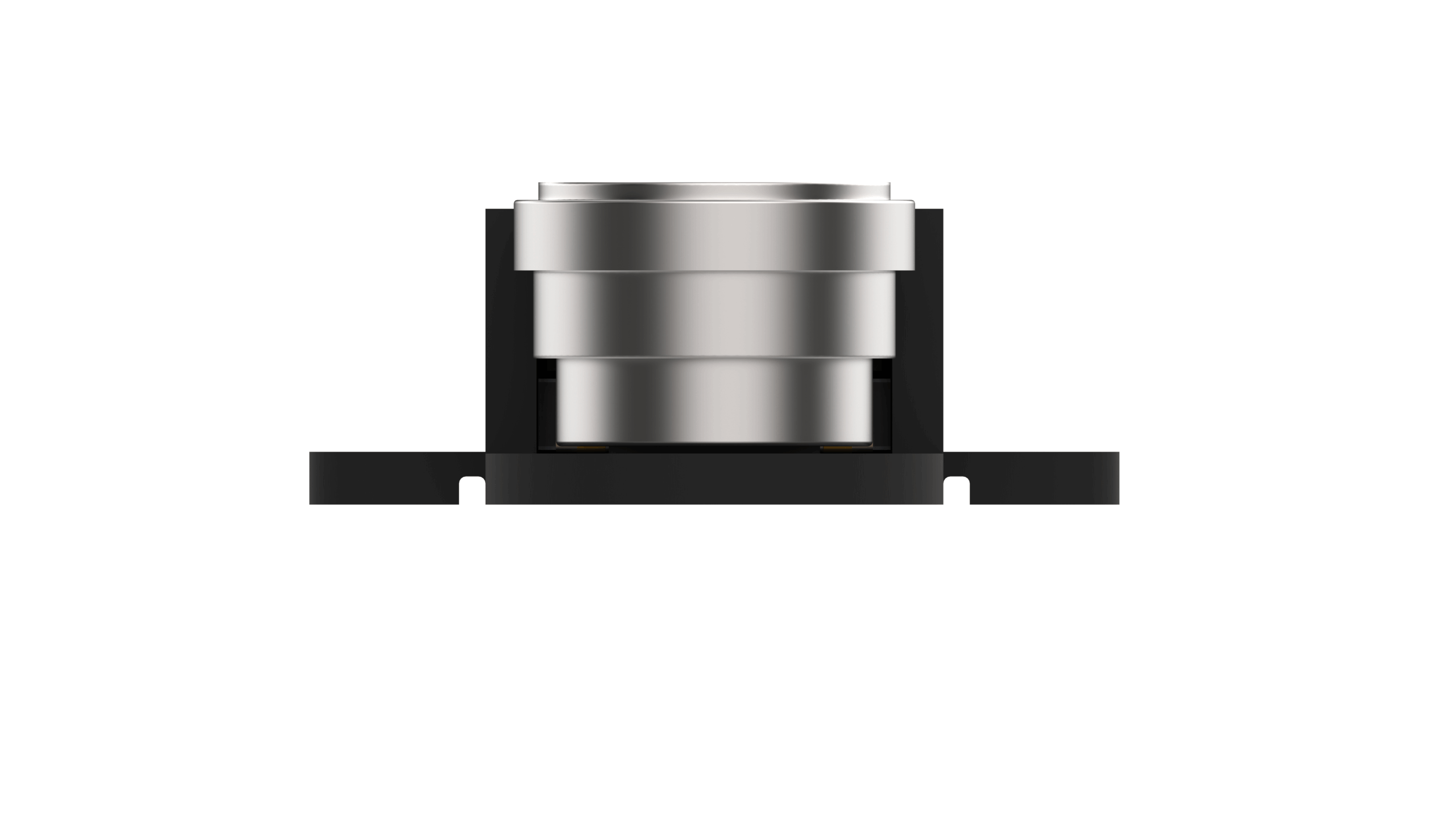
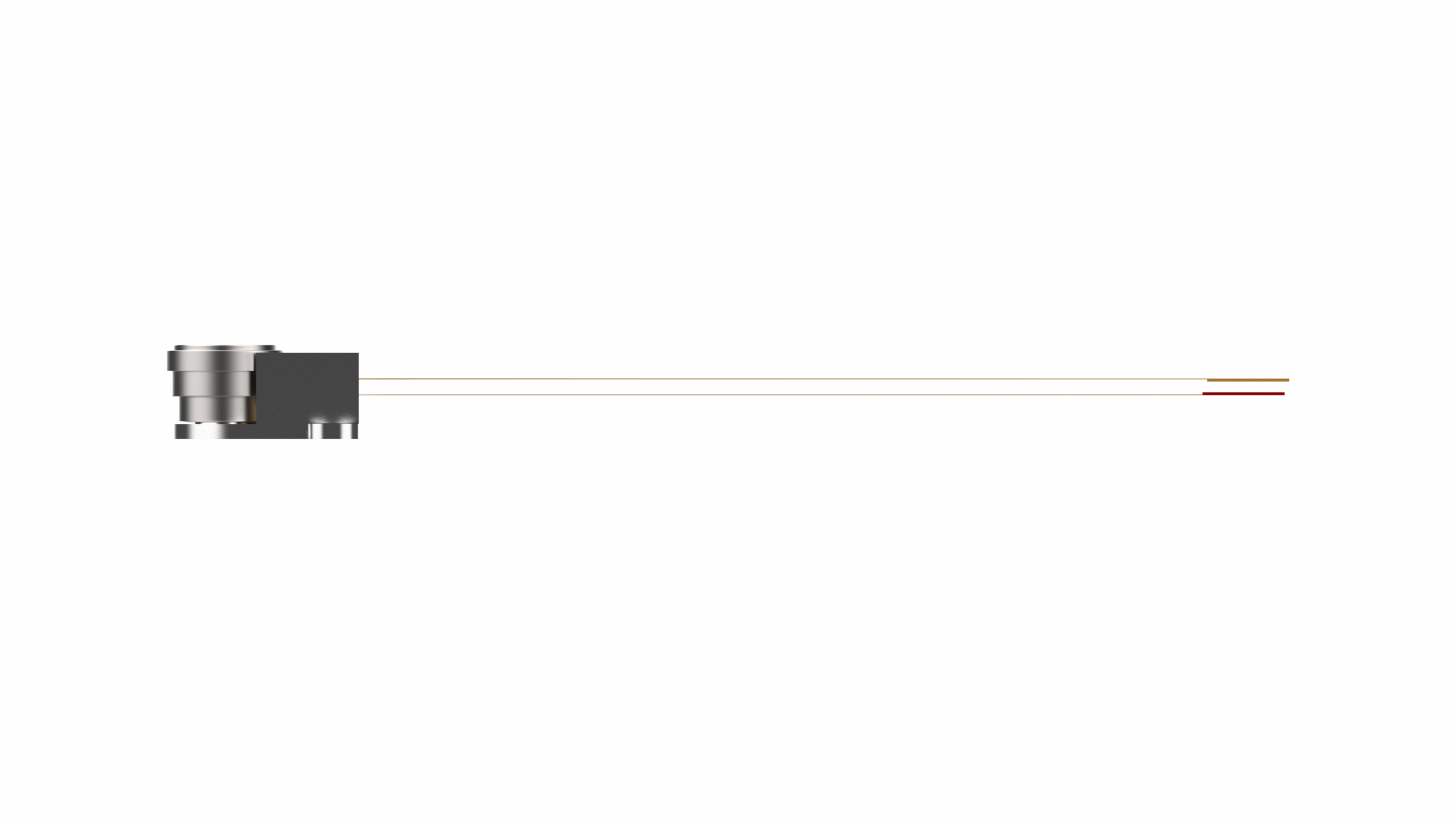
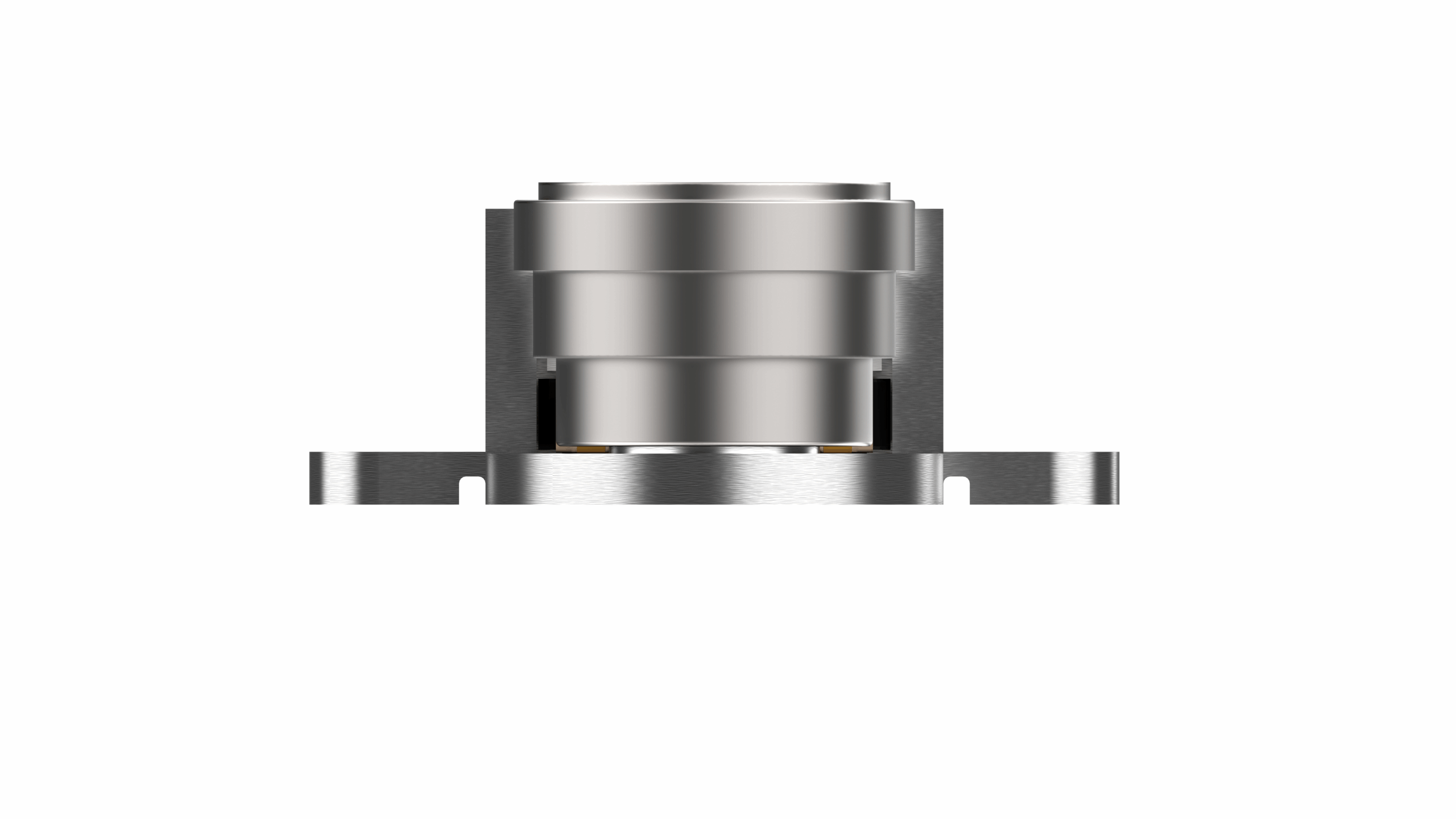
ROMO Series Hollow Shaft Dimensional Drawings
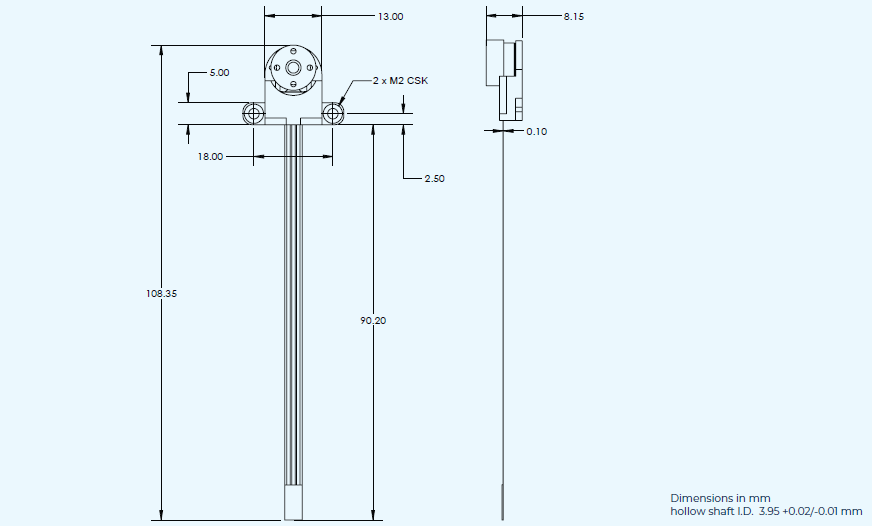
STANDARD MODEL
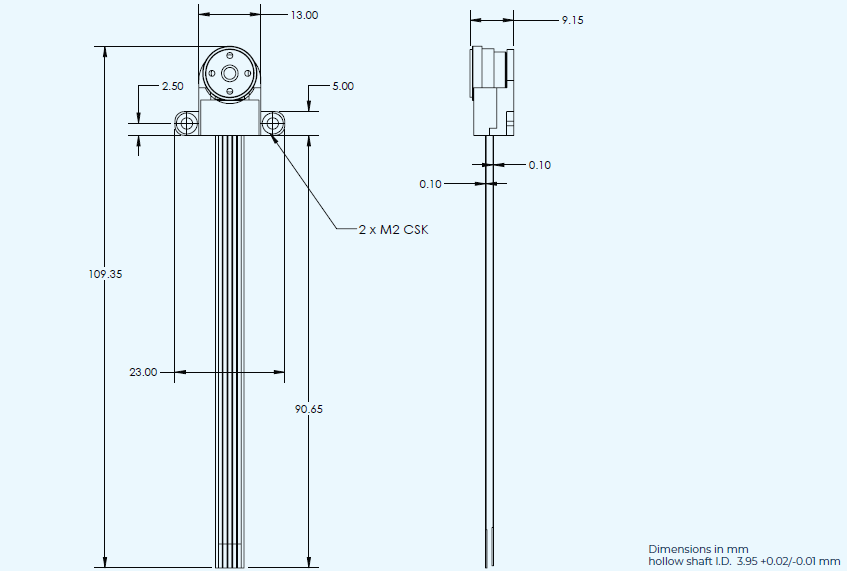
ENCODER MODEL
Motor control
The electronic driver is designed to offer an economical interface for user control. Motion of the motor is achieved via PWM (Pulse Width Modulation) control signals via the J1 connector on the driver. The driver PCB also supports UART and I2C interfaces. Each driver PCB is pre-programmed for the specific motor model and allows for software configurability, optimizing drive signals and integrating controls. Motor operation can be finely regulated through closed-loop control using an optional encoder factory-installed on the actuator.
OPEN LOOP
CLOSED-LOOP
Electronic PCB Driver for ROMO Series Piezo Actuators
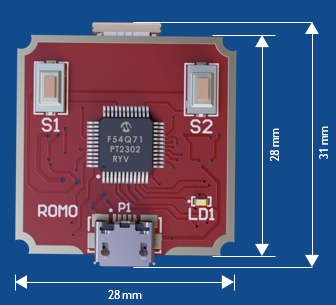
ROMO & ROMO-E
Electronic Driver PCB
ROMO-E-CL
Electronic Driver PCB
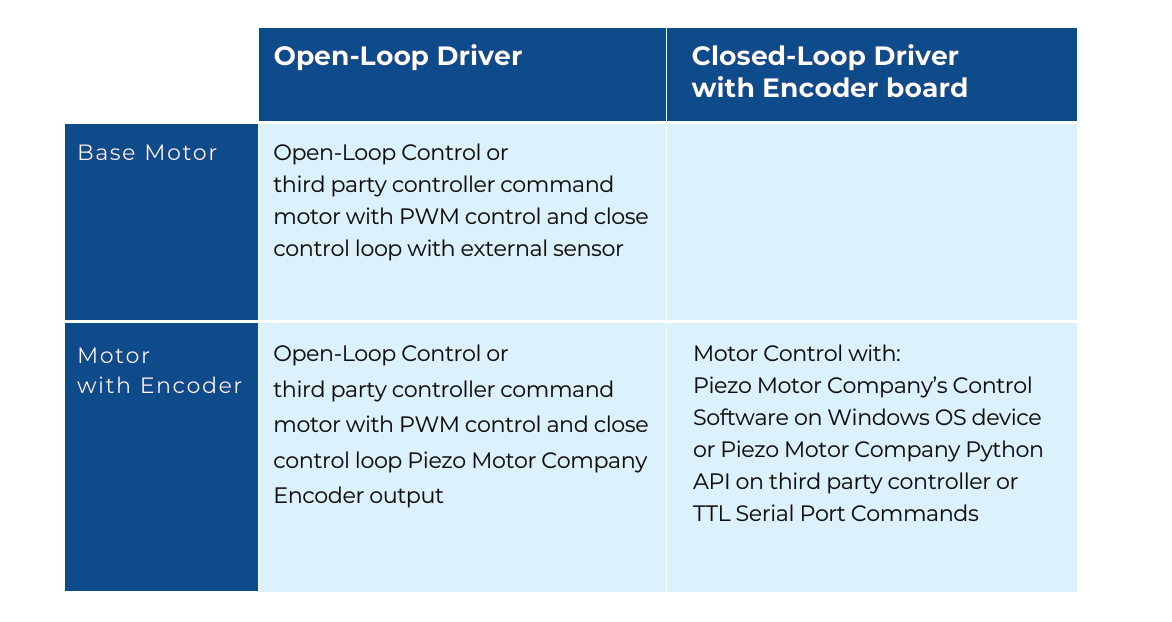
Control architecture & options
Piezo Motor Company motors are available as a basic motor or with a fitted encoder. Piezo Motor Company electronic drivers are available as open-loop or closed-loop drivers. Motors can be simply controlled in open-loop mode with several options for achieving closed-loop motion control. To learn more, visit https://piezomotors.com/
DRIVER BOARDS ROMO, ROMO-E, ROMO-E-CL SERIES

Performance Chart and Motor/Driver Part Configurations
| Motor Type | ROMO Series | ROMO-E Series | ROMO-E-CL Series | |||
| Model | ROMO | ROMO-M | ROMO-E | ROMO-E-M | ROMO-E-CL-KIT | ROMO-E-CL-M-KIT |
| Part Number | ROMO-011-0370 | ROMO-012-0370 | ROMO-011-1370 | ROMO-012-1370 | ROMO-011-1371 | ROMO-012-1371 |
| Encoder | Without Encoder | Without Encoder | With Encoder | With Encoder | With Encoder | With Encoder |
| Enclosure | Plastic | Metal | Plastic | Metal | Plastic | Metal |
| Torque (mN.m) | ≥ 4 mNm | ≥ 4 mNm | ≥ 4 mNm | ≥ 4 mNm | ≥ 4 mNm | ≥ 4 mNm |
| Resolution | > 30 μRad = 200,000 steps per rotation | > 30 μRad = 200,000 steps per rotation | > 30 μRad = 200,000 steps per rotation | > 30 μRad = 200,000 steps per rotation | > 30 μRad = 200,000 steps per rotation | > 30 μRad = 200,000 steps per rotation |
| Max speed | >600 RPM | >600 RPM | >600 RPM | >600 RPM | >600 RPM | >600 RPM |
| Supply | 5.0 to 7.5 V DC | 5.0 to 7.5 V DC | 5.0 to 7.5 V DC | 5.0 to 7.5 V DC | 5.0 to 7.5 V DC | 5.0 to 7.5 V DC |
| Kit Ordering Number | ROMO-KIT | ROMO-M-KIT | ROMO-E-KIT | ROMO-E-M-KIT | ROMO-E-CL-KIT | ROMO-E-CL-M-KIT |
| Part | ROMO-011-0371 | ROMO-012-0371 | ROMO-011-1371 | ROMO-012-1371 | ROMO-011-1371 | ROMO-012-1371 |
| Includes | Rotary motor, Plastic Enclosure Evaluation Kit* | Rotary motor, Metal Enclosure Evaluation Kit* | Rotary motor with encoder Plastic Enclosure Evaluation Kit* | Rotary motor with encoder Metal Enclosure Evaluation Kit* | Rotary motor with encoder** closed-loop System Evaluation Kit. Includes: motor/encoder with plastic enclosure electronic driver PCB, Micro USB to USB adapter (5 V DC), cables and Python API software | Rotary motor with encoder** closed-loop System Evaluation Kit. Includes: motor/encoder with metal enclosure electronic driver PCB, Micro USB to USB adapter (5 V DC), cables and Python API software |
*Evaluation Kit: includes ROMO motor, Electronic Driver PCB, cables, 120/240 VAC to 5.0 VDC or 7.5 VDC wall power adapter
For custom inquires, contact us at info@piezomotorco.com
ROMO-Series ordering Information
| Model | P/N | Description | Technical Specifications |
| ROMO | ROMO-011-0370 | Rotary Piezo Motor without encoder, Plastic Enclosure – Torque: >4.0 mN.m, Resolution: > 200,000 steps per rotation, Max Speed: >600 RPM, 7.5 V DC. | Power Supply Voltage 7.5 V DC Stall Torque ≥ 4 mNm Self-Braking Torque ≥ 5 mNm Actuator Response Time < 30 µs Max Speed > 600 rpm Minimum Angular Step 30 µrad Angular Backlash 30 µrad Angular Hysteresis 30 µrad Frequency Response 4 kHz Operating Temperature -20 °C to 80 °C Maximum Axial Load 200 g Maximum Radial Load 200 g Moment of Inertia 29.2 g·mm² Max Current over velocity range 300 mA Rotor Runout ≤50 µm Actuator Weight 3.5 g Actuator Dimensions (no shaft) 13 x 18.7 x 8.2 mm Driver PCB Dimensions 28 X 31 X 9.6 mm Driver PCB Weight 4.3 g |
| ROMO-M | ROMO-012-0370 | Rotary Piezo Motor without encoder, Metal Enclosure – Torque: >4.0 mN.m, Resolution: > 200,000 steps per rotation, Max Speed: >600 RPM, 7.5 V DC. | Power Supply Voltage 7.5 V DC Stall Torque ≥ 4 mNm Self-Braking Torque ≥ 5 mNm Actuator Response Time < 30 µs Max Speed > 600 rpm Minimum Angular Step 30 µrad Angular Backlash 30 µrad Angular Hysteresis 30 µrad Frequency Response 4 kHz Operating Temperature -20 °C to 80 °C Maximum Axial Load 200 g Maximum Radial Load 200 g Moment of Inertia 29.2 g·mm² Max Current over velocity range 300 mA Rotor Runout ≤50 µm Actuator Weight 4.0 g Actuator Dimensions (no shaft) 13 x 18.7 x 8.2 mm Driver PCB Dimensions 28 X 31 X 9.6 mm Driver PCB Weight 4.3 g |
| ROMO-E | ROMO-011-1370 | Rotary Piezo Motor with magnetic encoder, Plastic Enclosure – Torque: >4.0 mN.m, Resolution: > 200,000 steps per rotation, Encoder Resolution 1,024 ppr/6.1 mrad, Max Speed: >600 RPM, 7.5 V DC | Power Supply Voltage 7.5 V DC Stall Torque ≥ 4 mNm Self-Braking Torque ≥ 5 mNm Actuator Response Time < 30 µs Max Speed > 600 rpm Minimum Angular Step < 30 µrad Encoder Resolution (after quadrature) 1,024 ppr Minimum Controlled Angular Step 6.1 mrad Uni-directional Repeatability 6.1 mrad Angular Backlash 30 µrad Angular Hysteresis 30 µrad Frequency Response 4 kHz Operating Temperature -20 °C to 80 °C Maximum Axial Load 200 g Maximum Radial Load 200 g Moment of Inertia 29.2 g·mm² Max Current over velocity range 300 mA Rotor Runout ≤50 µm Actuator Weight 4.0 g Actuator Dimensions (no shaft) 13 x 18.7 x 9.1 mm Driver PCB Dimensions 28 X 31 X 9.6 mm Driver PCB Weight 4.3 g |
| ROMO-E-M | ROMO-012-1370 | Rotary Piezo Motor with magnetic encoder, Metal Enclosure – Torque: >4.0 mN.m, Resolution: > 200,000 steps per rotation, Encoder Resolution 1,024 ppr/6.1 mrad, Max Speed: >600 RPM, 7.5 V DC | Power Supply Voltage 7.5 V DC Stall Torque ≥ 4 mNm Self-Braking Torque ≥ 5 mNm Actuator Response Time < 30 µs Max Speed > 600 rpm Minimum Angular Step < 30 µrad Encoder Resolution (after quadrature) 1,024 ppr Minimum Controlled Angular Step 6.1 mrad Uni-directional Repeatability 6.1 mrad Angular Backlash 30 µrad Angular Hysteresis 30 µrad Frequency Response 4 kHz Operating Temperature -20 °C to 80 °C Maximum Axial Load 200 g Maximum Radial Load 200 g Moment of Inertia 29.2 g·mm² Max Current over velocity range 300 mA Rotor Runout ≤50 µm Actuator Weight 4.5 g Actuator Dimensions (no shaft) 13 x 18.7 x 9.1 mm Driver PCB Dimensions 28 X 31 X 9.6 mm Driver PCB Weight 4.3 g |
| ROMO-KIT | ROMO-011-0371 | Rotary Motor Evaluation Kit – Includes ROMO motor, Plastic Enclosure, Electronic Driver PCB, 120/240 V AC to 7.5 VDC power adapter and cables | Power Supply Voltage 7.5 V DC Stall Torque ≥ 4 mNm Self-Braking Torque ≥ 5 mNm Actuator Response Time < 30 µs Max Speed > 600 rpm Minimum Angular Step 30 µrad Angular Backlash 30 µrad Angular Hysteresis 30 µrad Frequency Response 4 kHz Operating Temperature -20 °C to 80 °C Maximum Axial Load 200 g Maximum Radial Load 200 g Moment of Inertia 29.2 g·mm² Max Current over velocity range 300 mA Rotor Runout ≤50 µm Actuator Weight 3.5 g Actuator Dimensions (no shaft) 13 x 18.7 x 8.2 mm Driver PCB Dimensions 28 X 31 X 9.6 mm Driver PCB Weight 4.3 g |
| ROMO-M-KIT | ROMO-012-0370 | Rotary Motor Evaluation Kit – Includes ROMO motor, Metal Enclosure, Electronic Driver PCB, 120/240 V AC to 7.5 VDC power adapter and cables | Power Supply Voltage 7.5 V DC Stall Torque ≥ 4 mNm Self-Braking Torque ≥ 5 mNm Actuator Response Time < 30 µs Max Speed > 600 rpm Minimum Angular Step 30 µrad Angular Backlash 30 µrad Angular Hysteresis 30 µrad Frequency Response 4 kHz Operating Temperature -20 °C to 80 °C Maximum Axial Load 200 g Maximum Radial Load 200 g Moment of Inertia 29.2 g·mm² Max Current over velocity range 300 mA Rotor Runout ≤50 µm Actuator Weight 4.0 g Actuator Dimensions (no shaft) 13 x 18.7 x 8.2 mm Driver PCB Dimensions 28 X 31 X 9.6 mm Driver PCB Weight 4.3 g |
| ROMO-E-KIT | ROMO-011-1371 | Rotary Motor with Magnetic Encoder Evaluation Kit – Includes ROMO-E motor, Plastic Enclosure, Electronic Driver PCB, 120/240 V AC to 7.5 VDC power adapter and cables. | Power Supply Voltage 7.5 V DC Stall Torque ≥ 4 mNm Self-Braking Torque ≥ 5 mNm Actuator Response Time < 30 µs Max Speed > 600 rpm Minimum Angular Step < 30 µrad Encoder Resolution (after quadrature) 1,024 ppr Minimum Controlled Angular Step 6.1 mrad Uni-directional Repeatability 6.1 mrad Angular Backlash 30 µrad Angular Hysteresis 30 µrad Frequency Response 4 kHz Operating Temperature -20 °C to 80 °C Maximum Axial Load 200 g Maximum Radial Load 200 g Moment of Inertia 29.2 g·mm² Max Current over velocity range 300 mA Rotor Runout ≤50 µm Actuator Weight 4.0 g Actuator Dimensions (no shaft) 13 x 18.7 x 9.1 mm Driver PCB Dimensions 28 X 31 X 9.6 mm Driver PCB Weight 4.3 g |
| ROMO-E-M-KIT | ROMO-012-1371 | Rotary Motor with Magnetic Encoder Evaluation Kit – Includes ROMO-E motor, Metal Enclosure, Electronic Driver PCB, 120/240 V AC to 7.5 VDC power adapter and cables. | Power Supply Voltage 7.5 V DC Stall Torque ≥ 4 mNm Self-Braking Torque ≥ 5 mNm Actuator Response Time < 30 µs Max Speed > 600 rpm Minimum Angular Step < 30 µrad Encoder Resolution (after quadrature) 1,024 ppr Minimum Controlled Angular Step 6.1 mrad Uni-directional Repeatability 6.1 mrad Angular Backlash 30 µrad Angular Hysteresis 30 µrad Frequency Response 4 kHz Operating Temperature -20 °C to 80 °C Maximum Axial Load 200 g Maximum Radial Load 200 g Moment of Inertia 29.2 g·mm² Max Current over velocity range 300 mA Rotor Runout ≤50 µm Actuator Weight 4.5 g Actuator Dimensions (no shaft) 13 x 18.7 x 9.1 mm Driver PCB Dimensions 28 X 31 X 9.6 mm Driver PCB Weight 4.3 g |
| ROMO-E-KIT-CL | ROMO-011-1371-CL | Rotary Motor with Magnetic Encoder Evaluation Kit with Close-Loop Python API – Includes ROMO-E motor, Plastic Enclosure, Electronic Driver PCB, USB to Micro USB adapter cable and Python API. | Power Supply Voltage 7.5 V DC Stall Torque ≥ 4 mNm Self-Braking Torque ≥ 5 mNm Actuator Response Time < 30 µs Max Speed > 600 rpm Minimum Angular Step < 30 µrad Encoder Resolution (after quadrature) 1,024 ppr Minimum Controlled Angular Step 6.1 mrad Uni-directional Repeatability 6.1 mrad Angular Backlash 30 µrad Angular Hysteresis 30 µrad Frequency Response 4 kHz Operating Temperature -20 °C to 80 °C Maximum Axial Load 200 g Maximum Radial Load 200 g Moment of Inertia 29.2 g·mm² Max Current over velocity range 300 mA Rotor Runout ≤50 µm Actuator Weight 4.0 g Actuator Dimensions (no shaft) 13 x 18.7 x 9.1 mm Driver PCB Dimensions 28 X 31 X 9.6 mm Driver PCB Weight 4.3 g |
| ROMO-E-M-KIT-CL | ROMO-012-1371-CL | Rotary Motor with Magnetic Encoder Evaluation Kit with Close-Loop Python API – Includes ROMO-E motor, Metal Enclosure, Electronic Driver PCB, USB to Micro USB adapter cable and Python API. | Power Supply Voltage 7.5 V DC Stall Torque ≥ 4 mNm Self-Braking Torque ≥ 5 mNm Actuator Response Time < 30 µs Max Speed > 600 rpm Minimum Angular Step < 30 µrad Encoder Resolution (after quadrature) 1,024 ppr Minimum Controlled Angular Step 6.1 mrad Uni-directional Repeatability 6.1 mrad Angular Backlash 30 µrad Angular Hysteresis 30 µrad Frequency Response 4 kHz Operating Temperature -20 °C to 80 °C Maximum Axial Load 200 g Maximum Radial Load 200 g Moment of Inertia 29.2 g·mm² Max Current over velocity range 300 mA Rotor Runout ≤50 µm Actuator Weight 4.5 g Actuator Dimensions (no shaft) 13 x 18.7 x 9.1 mm Driver PCB Dimensions 28 X 31 X 9.6 mm Driver PCB Weight 4.3 g |
Driver Boards - ROMO Series
| ROLR-PCB | ROLR-PCB-001 | Open-loop Electronic Driver Board (Red PCB) 5.0/7.5 V DC for use with LRMO and ROMO Series | Open-loop Electronic Driver Board (Red PCB) 5.0/7.5 V DC for use with LRMO and ROMO Series |
| ROMO-E-PCB | ROMO-E-PCB003 | Factory Pre-Programmed Close-Loop Electronic Driver Board (Blue PCB) 5.0 V DC for use with ROMO-E-CL close loop system only | Factory Pre-Programmed Firmware \Close-Loop Electronic Driver Board (Blue PCB) 5.0 V DC for use with ROMO-E close loop system only |
| ROMO-E-PCB | ROMO-E-PCB005 | Factory Pre-Programmed I2C Close-Loop Electronic Driver Board (Blue PCB) 5.0 V DC for use with ROMO-E for close loop I2C system only | Factory Pre-Programmed I2C Close-Loop Electronic Driver Board (Blue PCB) 5.0 V DC for use with ROMO-E for close loop I2C system only |
| IC2 Adapter | I2C-PCB-001 | I²C Adapter Board with Python Software Library supports up to six (6) ROMO-E Driver Boards for simultaneous control of six (6) ROMO-E motors. Includes a universal 110/220 V AC to 5 V DC wall power adapter. | I²C Adapter Board with Python Software Library supports up to six (6) ROMO-E Driver Boards for simultaneous control of six (6) ROMO-E motors. Includes a universal 110/220 V AC to 5 V DC wall power adapter. |