Linear Piezomotor LRMO-LG Series
Piezo Motor Company’s novel series of linear piezoelectric motors represent a quantum leap in design construction of compact, high-precision, performance linear motor technologies.
This new range of linear motors combines superior nanometer precision and ultrafast response at a very economical cost.

Motion Control Options
Piezo Motor Company’s rotary motors are available with or without factory-fitted encoders. Fully closed-loop systems are also available:Motion control is achieved using the electronic driver board, designed to offer an economical interface for user control.
Electronic Driver Board Interface Supports UART & I2C
The driver PCB supports UART and I2C interfaces, enhancing its adaptability. Each board is pre-programmed for the specific motor model, allowing for software configurability, optimizing drive signals, and integrating controls. Motor operation can be finely regulated by user through closed- loop control with an optional encoder installed on the motor/actuator.
Closed-loop Systems with Python API
PMC’s new Python API allows for feedback from the piezomotors’ encoder to be fed to the driver board, closing the loop. The position and speed of the motor can be controlled through an elaborate set of Python API commands, accessible via the MicroUSB port.
Performance and Benefits of LRMO-LG Series Rotary Motors
IMPROVED RESOLUTION
With a control step size of just 0.05 µm at full thrust or holding force, these linear motors offer 20,000 steps per mm of control.
FASTER REACTION TIME
Within 20 µs to 30 µs the piezo motor has made its first step, and motion has commenced compared to a stepper motor with a typical 5 ms to start motion.
HIGH-FORCE DENSITY
For their size and weight, these motors offer superior force density, particularly when compared with stepper and lead screw solutions.
ENERGY AND COST SAVINGS
The piezo motor consumes zero power at holding force and very low power at slow speed (0.06 W at 1 mm/s), yielding the possibility of very efficient overall duty.
SPECIAL PROPERTIES
Piezo Motor Company motors are immune to EMI and RF interference and have no emissions, making them ideal for a range of sensitive applications. For specialized applications (including MRI) please contact our technical team.
ECONOMICAL DESIGN
The innovative design and patent-protected technology packaged in stable reinforced thermoplastic makes this high-performing automation affordable for OEM equipment designers.
LIGHTWEIGHT
Our piezo motor contains no copper windings, iron laminations, or permanent magnets and is significantly more powerful by weight than EM solutions. This makes them ideally suited to weight-critical applications.
MOTOR SPECIFICATIONS
| Specification | Standard | Encoder |
|---|---|---|
| Driver Board P/N | ROLR-LG-PCB | ROLR-LG-CL-PCB |
| Power Supply Voltage | 12 V | 12 V |
| Push/Pull Force | ≥ 4.0 N | ≥ 4.0 N |
| Self-Braking Force | ≥ 4.0 N | ≥ 4.0 N |
| Motor Response Time | ≈30µs | ≈30µs |
| Max Speed | 200 mm/s | 140 mm/s |
| Travel Range | 9.0 mm | 9.0 mm |
| Minimum Linear Step | <0.04 µm | <0.04 µm |
| Encoder Resolution (after quadrature) | N/A | 2.66 µm |
| Minimum Controlled Linear Step | N/A | 2.66 µm |
| Uni-directional Repeatability | N/A | 2.66 µm |
| Linear Backlash at Change of Direction | ≤ 0.1 µm | ≤ 0.1 µm |
| Elastic stiffness | ≈ 220 mN/µm | ≈ 220 mN/µm |
| Linear Hysteresis | ≤ 2.0 µm | ≤ 2.0 µm |
| Pitch | ≤450 µRad | ≤450 µRad |
| Maximum Moment Mx | 0.07 Nm | 0.07 Nm |
| Roll | ≤225 µRad | ≤225 µRad |
| Maximum Moment My | 0.12 Nm | 0.12 Nm |
| Yaw | ≤450 µRad | ≤450 µRad |
| Maximum Moment Mz | 0.9 Nm | 0.9 Nm |
| Vertical Runout | 3.0 µm | 3.0 µm |
| Horizontal Runout | 6.0 µm | 6.0 µm |
| Frequency Response | 4 kHz | 4 kHz |
| Operating Temperature | -20 to 80 °C | -20 to 80 °C |
| Max Current over velocity range | 350 mA | 350 mA |
| Motor Weight | 22 g | 25 g |
| Motor Dimensions | 40x31x11 mm | 40x31x11 mm |
| Driver PCB Dimensions | 40x63x25 mm | 40x63x25 mm |
| Driver PCB Weight | 25 g | 25 g |
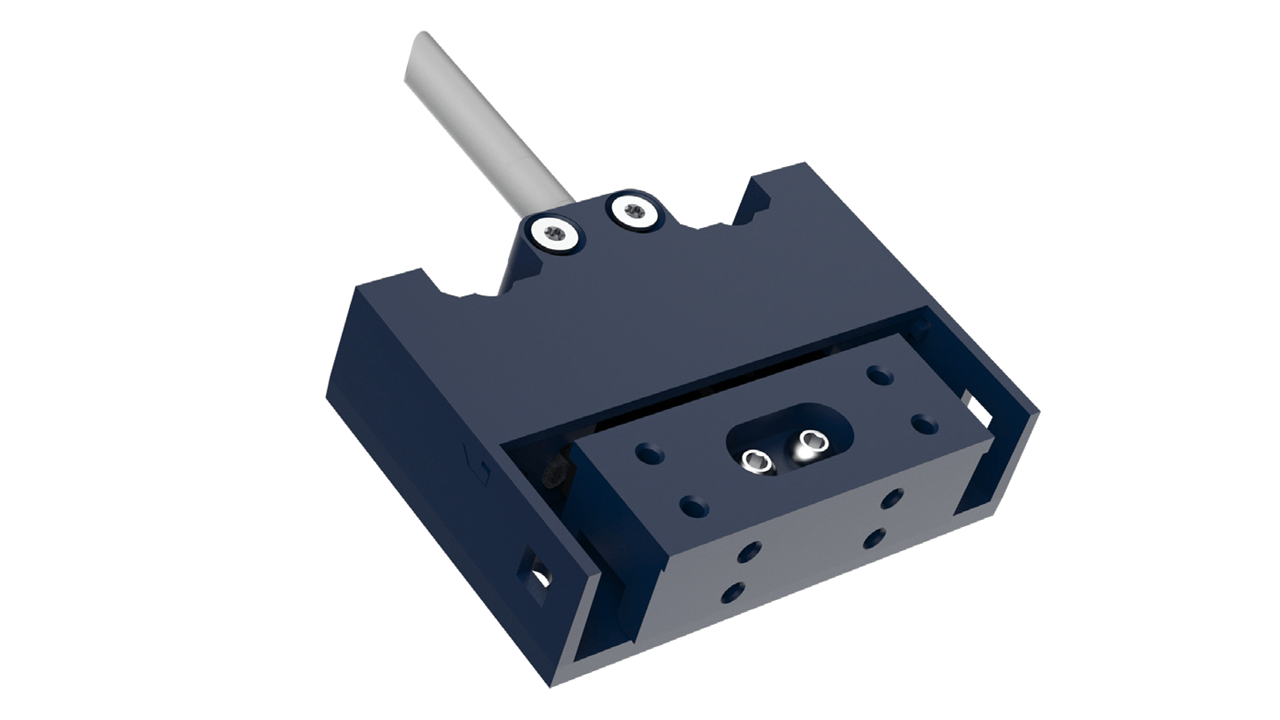
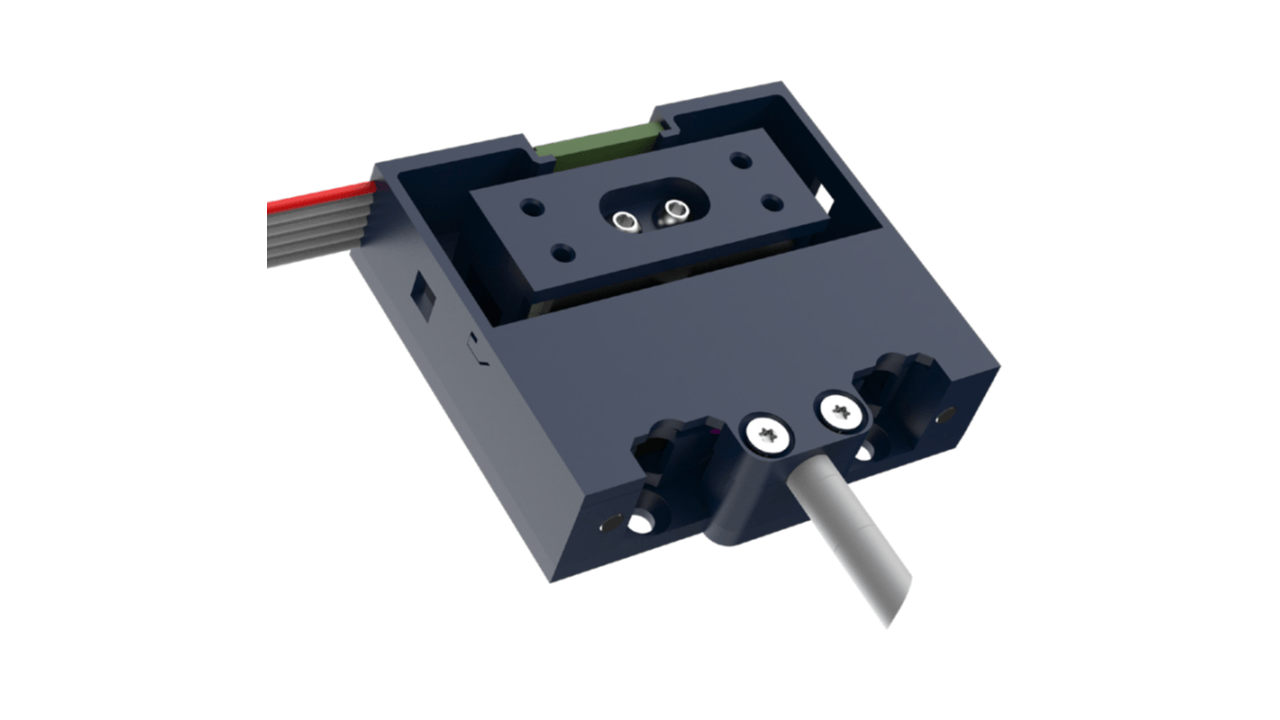
LRMO-LG Series

LRMO-LG Series Linear Motor with Encoder

LRMO-LG Series Linear Standard Motor
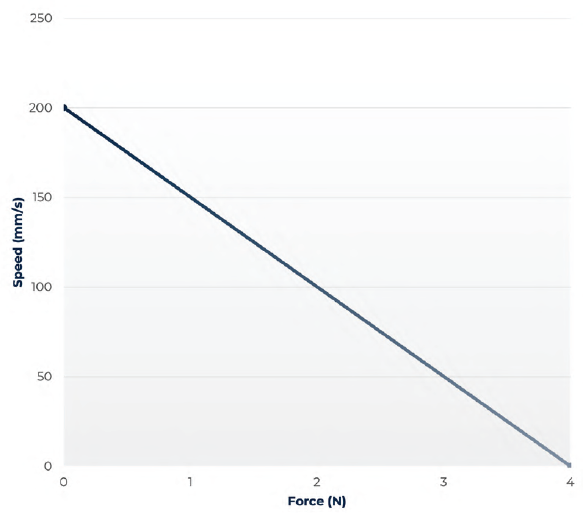
Speed-Force Curve for LRMO-LG Series Linear Motor
Principle of operation
LRMO-LG Series dimensional drawings
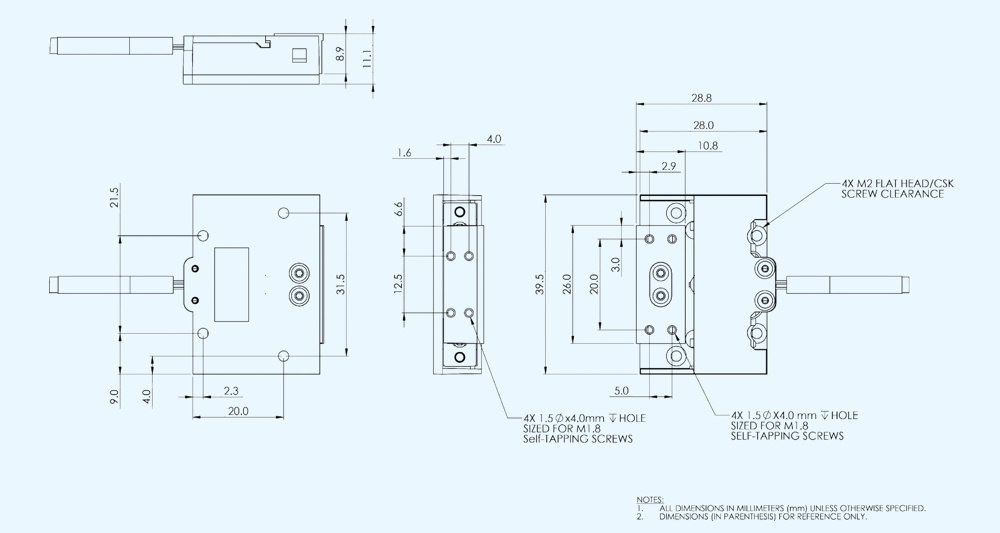
STANDARD MODEL
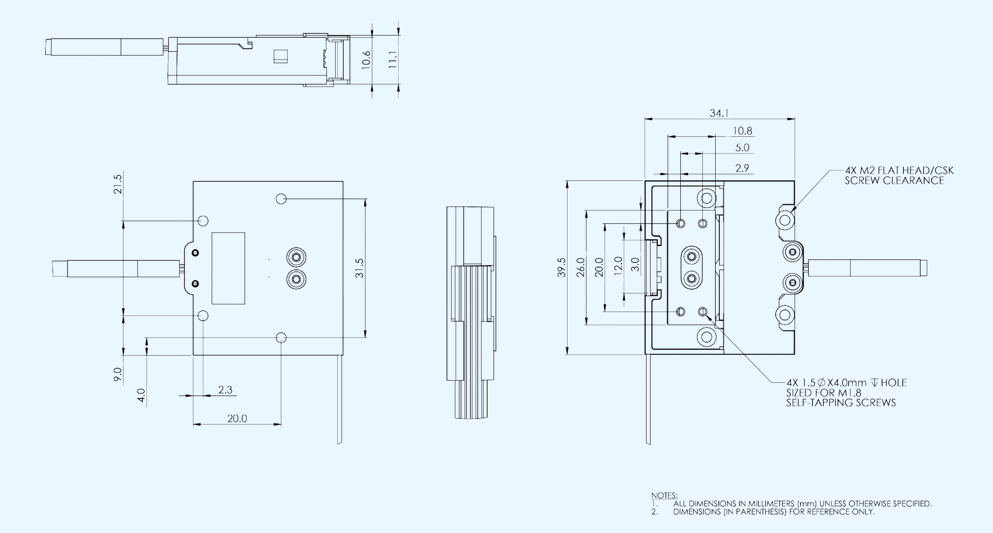
ENCODER MODEL
Motor control
OPEN LOOP
CLOSED-LOOP
Electronic PCB Driver for LRMO-LG Series Piezomotors
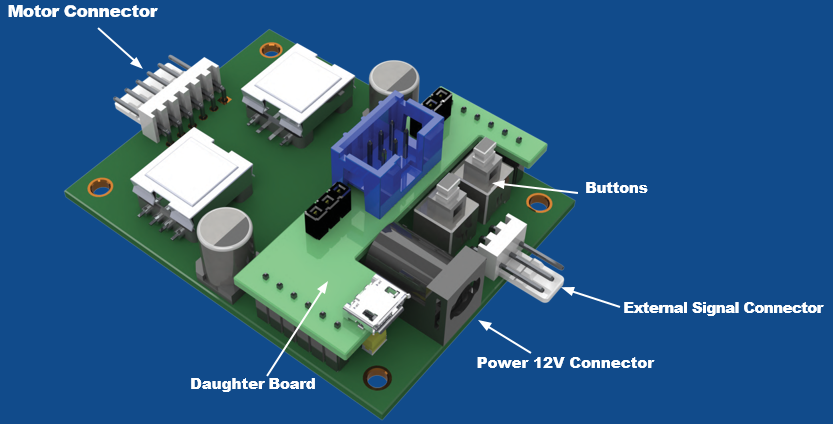
ELECTRONIC DRIVER
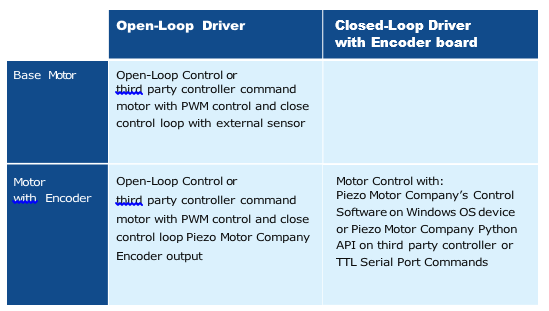
Control architecture & options
Piezo Motor Company motors are available as a basic motor or with a fitted encoder. Piezo Motor Company electronic drivers are available as open-loop or closed-loop drivers which are fitted with an encoder daughter board. Motors can be simply controlled in open-loop mode with several options for achieving closed-loop motion control. To learn more, visit https://piezomotors.com/
DRIVER BOARDS ROMO-LG & LRMO-LG SERIES

Evaluation Kits
ORDERING INFORMATION
| Motor Type | LRMO-LG | LRMO-E-LG |
| Model | LRMO-LG | LRMO-E-LG |
| Part Number | LRMO-011-0280 | LRMO-011-1280 |
| Encoder | without Encoder | with Optical Encoder |
| Enclosure | Plastic Enclosure | Plastic Enclosure |
| Resolution | 50 nm = 20,000 steps per mm of travel | 50 nm = 20,000 steps per mm of travel |
| Max Speed | >0.2 m/s | >0.2 m/s |
| Response Time | < 30 μs | < 30 μs |
| Supply | 12 V DC | 12 V DC |
| Kit Ordering Number | LRMO-LG-KIT | LRMO-E-LG-KIT |
| Part | LRMO-011-0281 | LRMO-011-1281 |
| Supply (Kit) | 110/240 VAC to 12 V DC power adapter | 110/240 V AC to 12 V DC power adapter |
| Includes | Linear motor with Plastic Enclosure; power adapter, cables | Linear Motor with encoder; power adapter, cables |
LRMO-LG Series ordering Information
| LRMO-LG | LRMO-011-0280 | Linear Motor without Encoder, Plastic Enclosure, Resolution: 50 nm = 20,000 steps per mm of travel, Max Speed: >0.2 m/s, Response Time: < 30 µs, Voltage: 12 V DC | Power Supply Voltage 12.0 V DC Push/Pull Force ≥4.0 N Self-Braking Force ≥4.0 N Motor Response Time < 30 µs Travel Range 9.0 mm Max Speed (continuous mode) ≥200 mm/s Minimum Linear Step <0.05 µm Linear Backlash at Change of Direction n/a Elastic Stiffness n/a Linear Hysteresis n/a Pitch <450 µRad Maximum Moment Mx 0.07 Nm Roll <225 µRad Maximum Moment My 0.12 Nm Yaw <450 µRad Maximum Moment Mz 0.9 Nm Vertical Runout 3.0 µm Horizontal Runout 6.0 µm Frequency Response 4 kHz Operating Temperature -20 °C to 80 °C Maximum Load (at listed specification) 400 g Maximum Tolerable Load 4.2 kgf Max Current (continuous mode) 350 mA Max. Current at the velocity 10mm/s (PWM mode) 30-40 mA Motor Weight 22 g Motor Dimensions 40x31x11 mm |
| LRMO-LG-KIT | LRMO-011-0281 | Linear Motor Evaluation Kit without Encoder, Includes; Linear motor with Plastic Enclosure, Resolution: 50 nm = 20,000 steps per mm of travel, Max Speed: >0.2 m/s, Response Time: < 30 µs, 110/240 VAC to12 V DC power adapter, cables | Power Supply Voltage 12.0 V DC Push/Pull Force ≥4.0 N Self-Braking Force ≥4.0 N Motor Response Time < 30 µs Travel Range 9.0 mm Max Speed (continuous mode) ≥200 mm/s Minimum Linear Step <0.05 µm Linear Backlash at Change of Direction n/a Elastic Stiffness n/a Linear Hysteresis n/a Pitch <450 µRad Maximum Moment Mx 0.07 Nm Roll <225 µRad Maximum Moment My 0.12 Nm Yaw <450 µRad Maximum Moment Mz 0.9 Nm Vertical Runout 3.0 µm Horizontal Runout 6.0 µm Frequency Response 4 kHz Operating Temperature -20 °C to 80 °C Maximum Load (at listed specification) 400 g Maximum Tolerable Load 4.2 kgf Max Current (continuous mode) 350 mA Max. Current at the velocity 10mm/s (PWM mode) 30-40 mA Motor Weight 22 g Motor Dimensions 40x31x11 mm |
| LRMO-E-LG | LRMO-011-1280 | Linear Motor with optical Encoder, Plastic Enclosure, Resolution: 50 nm = 20,000 steps per mm of travel, Max Speed: >0.2 m/s, Response Time: < 30 µs, 12 V DC | Power Supply Voltage 12.0 V DC Push/Pull Force ≥4.0 N Self-Braking Force ≥4.0 N Motor Response Time < 30 µs Travel Range 9.0 mm Max Speed (continuous mode) ≥200 mm/s Minimum Linear Step <0.05 µm Encoder resolution after quadrature 2.66 µm, Minimum Controlled step 2.66 µm, Unidirectional repeatability 2.66 µm Linear Backlash at Change of Direction n/a Elastic Stiffness n/a Linear Hysteresis n/a Pitch <450 µRad Maximum Moment Mx 0.07 Nm Roll <225 µRad Maximum Moment My 0.12 Nm Yaw <450 µRad Maximum Moment Mz 0.9 Nm Vertical Runout 3.0 µm Horizontal Runout 6.0 µm Frequency Response 4 kHz Operating Temperature -20 °C to 80 °C Maximum Load (at listed specification) 400 g Maximum Tolerable Load 4.2 kgf Max Current (continuous mode) 350 mA Max. Current at the velocity 10mm/s (PWM mode) 30-40 mA Motor Weight 25 g Motor Dimensions 40x34x11 mm |
| LRMO-E-LG-KIT | LRMO-011-1281 | Linear Motor Evaluation Kit with optical Encoder, Includes; Linear Motor with encoder, Plastic Enclosure, Resolution: 50 nm = 20,000 steps per mm of travel, Max Speed: >0.2 m/s, Response Time: < 30 µs, 110/240 V AC to 12 V DC power adapter, cables | Power Supply Voltage 12.0 V DC Push/Pull Force ≥4.0 N Self-Braking Force ≥4.0 N Motor Response Time < 30 µs Travel Range 9.0 mm Max Speed (continuous mode) ≥200 mm/s Minimum Linear Step <0.05 µm Encoder resolution after quadrature 2.66 µm, Minimum Controlled step 2.66 µm, Unidirectional repeatability 2.66 µm Linear Backlash at Change of Direction n/a Elastic Stiffness n/a Linear Hysteresis n/a Pitch <450 µRad Maximum Moment Mx 0.07 Nm Roll <225 µRad Maximum Moment My 0.12 Nm Yaw <450 µRad Maximum Moment Mz 0.9 Nm Vertical Runout 3.0 µm Horizontal Runout 6.0 µm Frequency Response 4 kHz Operating Temperature -20 °C to 80 °C Maximum Load (at listed specification) 400 g Maximum Tolerable Load 4.2 kgf Max Current (continuous mode) 350 mA Max. Current at the velocity 10mm/s (PWM mode) 30-40 mA Motor Weight 25 g Motor Dimensions 40x34x11 mm |
Driver Boards - LRMO-LG Series
| ROLR-LG-PCB | ROLR-LG-PCB | Standard 12 VDC Driver board for ROMO-LG and LRMO-LG | Standard 12 VDC Driver board for ROMO-LG and LRMO-LG |
| ROLR-LG-CL-PCB | ROLR-LG-CL-PCB | Close-Loop Driver PCB 12 VDC for use with ROMO-E-LG and LRMO-E-LG | Close-Loop Driver PCB 12 VDC for use with ROMO-E-LG and LRMO-E-LG |