Ultra-Compact Piezoelectric XYZ Stage for Precision Motion
Key Advantages of LRMO-XYZ System
- Compact light weight design (just 1″ x 1″ x 1.8″)
- Superior Resolution: > 40 nm = 25,000 steps per mm of linear travel with 9.0 mm of Travel per Axis
- Max Speed: ≈0.15 m/s
- Fast Response Time: ≈30 μs
- Low Voltage Design: 5 V DC
- Zero power consumption in hold mode
- Optical encoder (optional): 2.66 μm close loop resolution
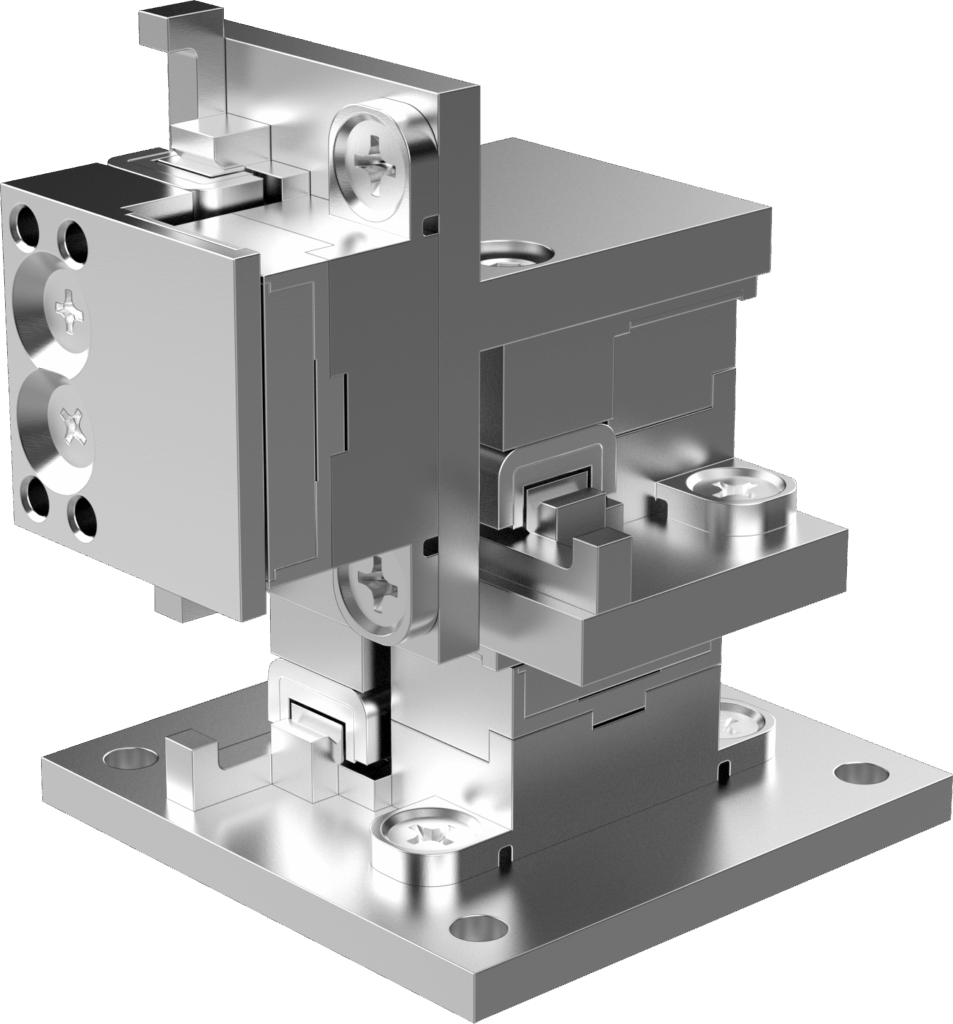
Design Principle
The LRMO-XYZ system integrates three precision miniature linear piezomotors each with 9.0 mm of travel (PMC Model# LRMO) into a compact XYZ stage, providing precise multi-axis motion in an
ultra-small footprint. It is ideal for space-limited applications where silent operation, zero backlash, and sub-micron resolution are required.
The LRMO-XYZ offers reliable, high-precision XYZ motion control for delicate applications where traditional XYZ designs are too bulky, heavy or generate electromagnetic interference, making it ideal for next-generation motion solutions in optics, life sciences, and precision instrumentation.
Electronic Driver Supports UART & I2C
The electronic driver is designed to offer an economical interface for
user control. Motion of the motor is achieved via PWM (Pulse Width
Modulation) control signals. The driver PCB also supports UART and I2C interfaces. The driver PCB is pre-programmed for software
configurability, optimizing drive signals and integrating controls. Motor operation can be finely regulated through closed-loop control using an optional encoder factory-installed on the actuator.
Typical Applications
PHOTONICS AND OPTICS
- Laser beam alignment and steering
- Optical switching and MEMS device positioning
- Fiber optic alignment for telecom or laboratory systems
MICROSCOPY AND LIFE SCIENCES
- Automated sample positioning and scanning
- Focus adjustment for imaging systems
- Compact stages for fluorescence or confocal microscopy
TEST AND MEASUREMENT
- Sensor and probe positioning in lab automation
- Fine calibration of microelectronic components
- Alignment in spectrometry or interferometry setups
PORTABLE AND EMBEDDED DEVICES
- Field-deployable optical or analytical instruments
- Medical devices requiring ultra-compact motion systems
LRMO-XYZ System Specifications
| Part No. (Non-Encoder Version) | LRMO-XYZ |
| Power Supply Voltage | 5.0 V DC |
| Push/Pull Force | ≥0.2 N |
| Self-Braking Force | ≥0.25 N |
| Motor Response Time | ≈30 µs |
| Travel Range | 9.0 mm |
| Max Speed (continuous mode) | ≈150 mm/s |
| Minimum Linear Step | <0.04 µm (<40 nm) |
| Linear Backlash at Change of Direction | <0.1 µm |
| Elastic Stiffness | ≈200 mN/µm |
| Linear Hysteresis | <2.0 µm |
| Pitch | <1 mrad |
| Maximum Moment Mx | 0.07 Nm |
| Roll | <0.5 mrad |
| Maximum Moment My | 0.12 Nm |
| Yaw | <1 mrad |
| Maximum Moment Mz | 0.9 Nm |
| Vertical Runout | 3.0 µm |
| Horizontal Runout | 6.0 µm |
| Frequency Response | 4 kHz |
| Operating Temperature | -20 °C to 80 °C |
| Maximum Load (at listed specification) | 20 g |
| Maximum Tolerable Load | 4.2 kgf |
| Max Current (continuous mode) | 300 mA |
| Max. Current at the velocity 10mm/s (PWM mode) | 30-40 mA |
|
System Weight
|
<50g
|
| Motor Dimensions |
1″ x 1″ x 1.8″
|
| Driver PCB Dimensions | 31x28x9.6 mm |
| Drive PCB Weight | 6.8 g |
Ordering Information
| Part Number | Description |
| LRMO-XYX-SYS | Includes: 3-Axis positioning system (non-encoder version), 3 X Driver PCB’s, I2C adapter board, Raspberry Pi Controller interface with LCD Display and Python API, 120/240 VAC to 5 VDC power adapter and cables. |
| LRMO-XYZ-E-SYS | Includes: 3-Axis positioning system (with optical encoders), 3 X Driver PCB’s, I2C adapter board, Raspberry Pi Controller interface with LCD Display and Python API close-loop software, 120/240 VAC to 5 VDC power adapter and cables. |
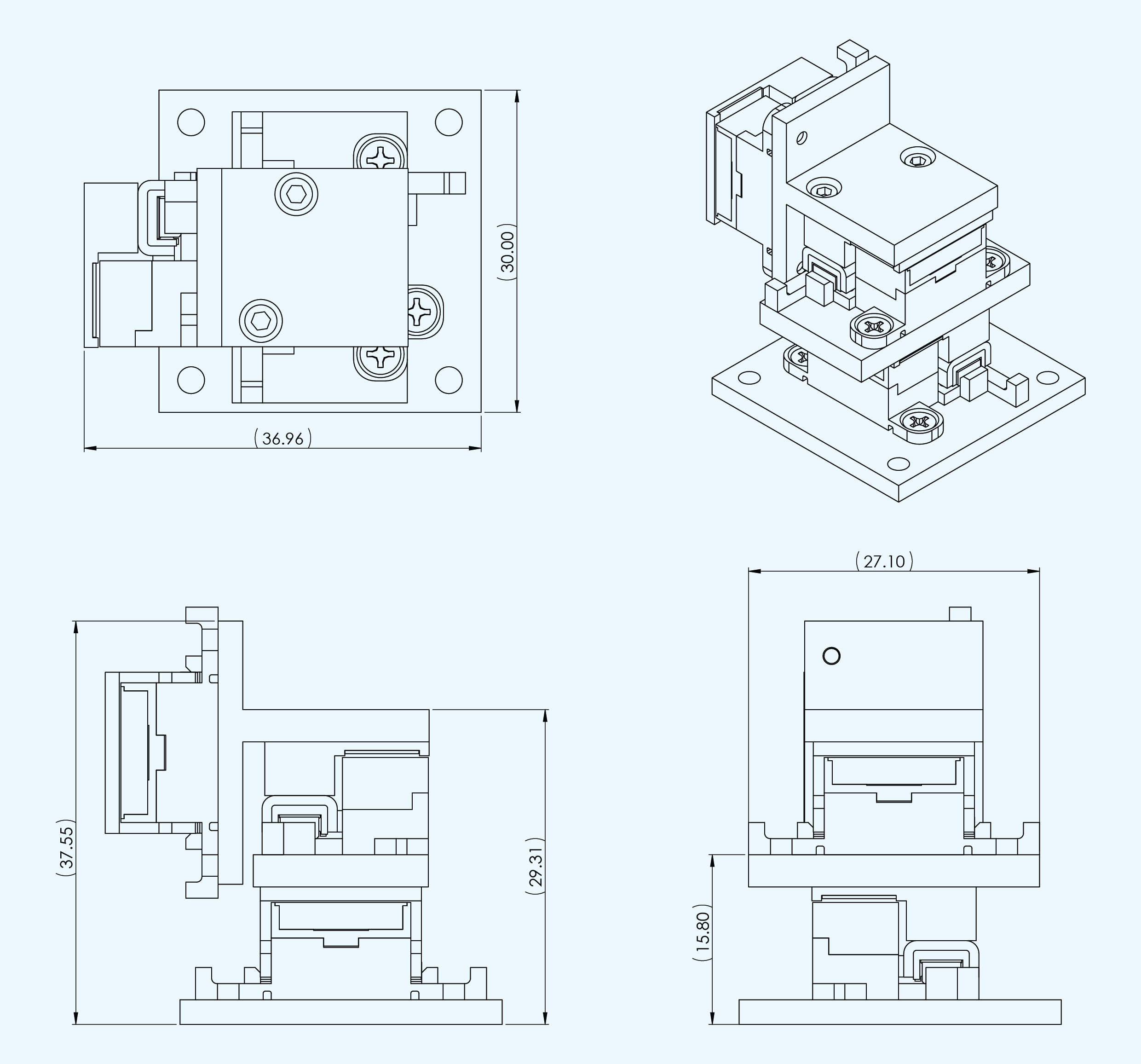
LRMO-XYZ Systems Dimensional Drawings
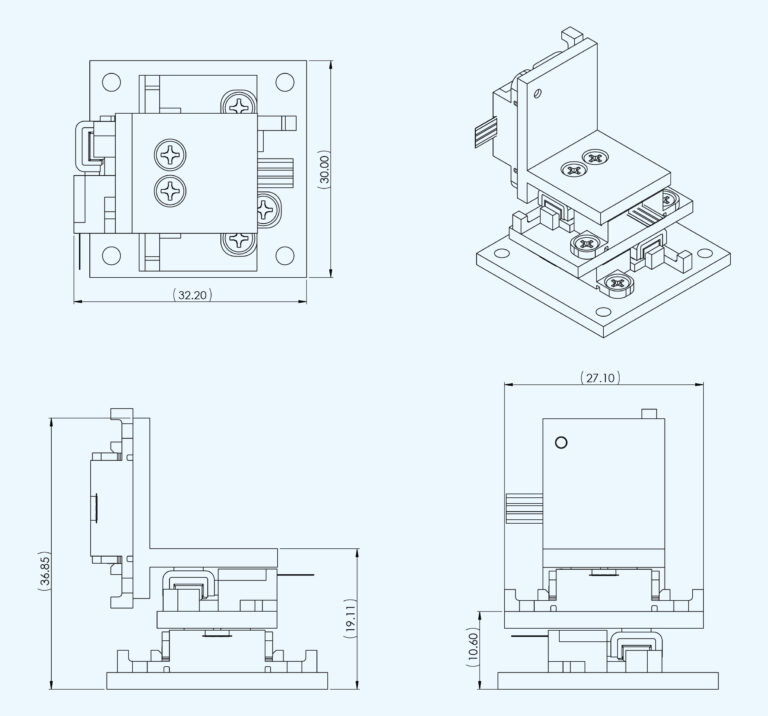
Standard Model (Dimensions in mm)