
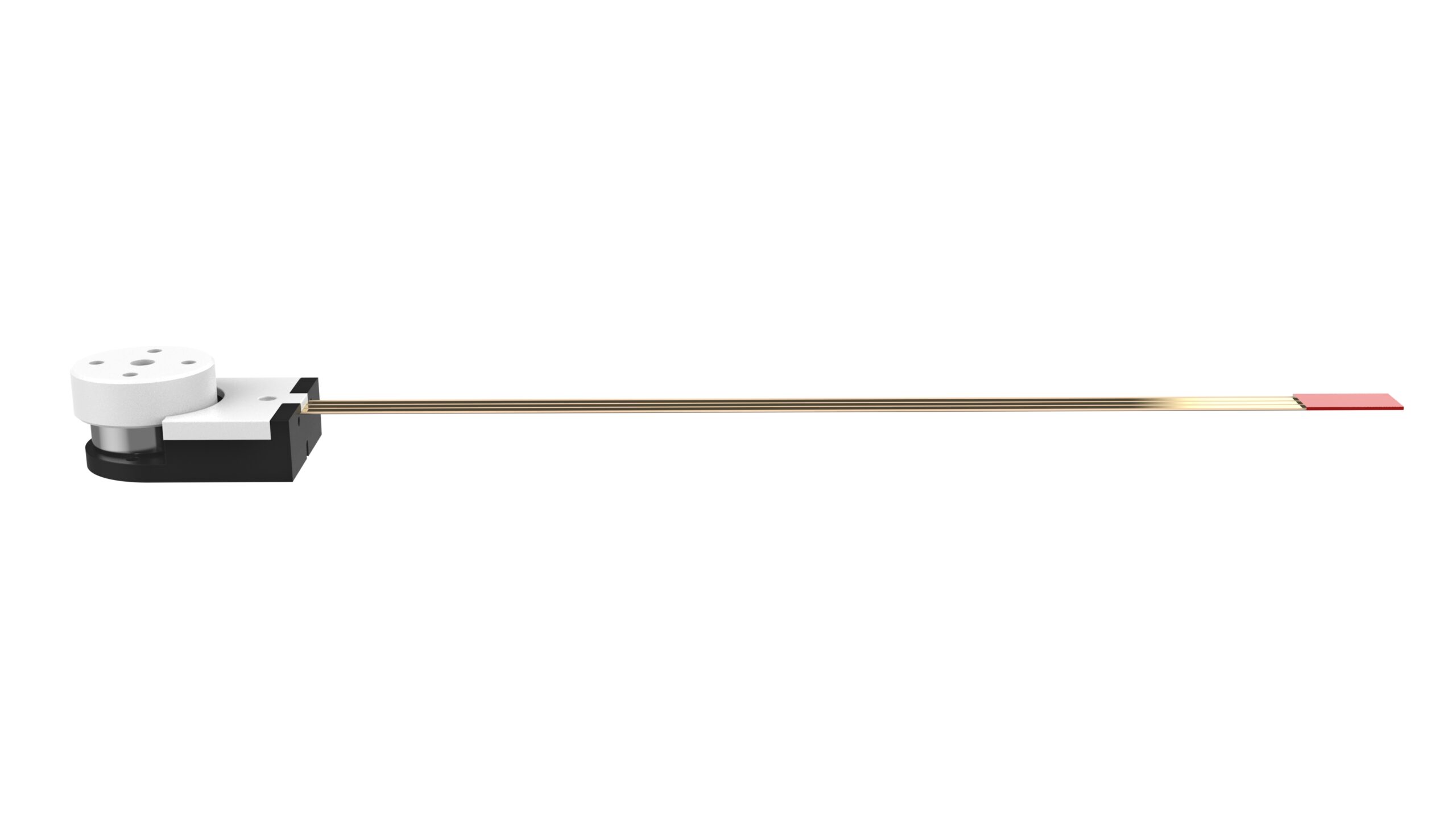

ROMO
ROMO
$105.07 – $216.45
Key Features
- Torque: >4.0 mN.m
- Resolution: > 30 µRad = 200,000 steps per rotation
- Max Speed: >600 RPM
- Fast Response Time: 30 µs
- Low Voltage: 5.0 to 7.5 V DC
- Low Current: 30 mA to 300 mA (max)
- Energy efficient: Zero power consumption in hold
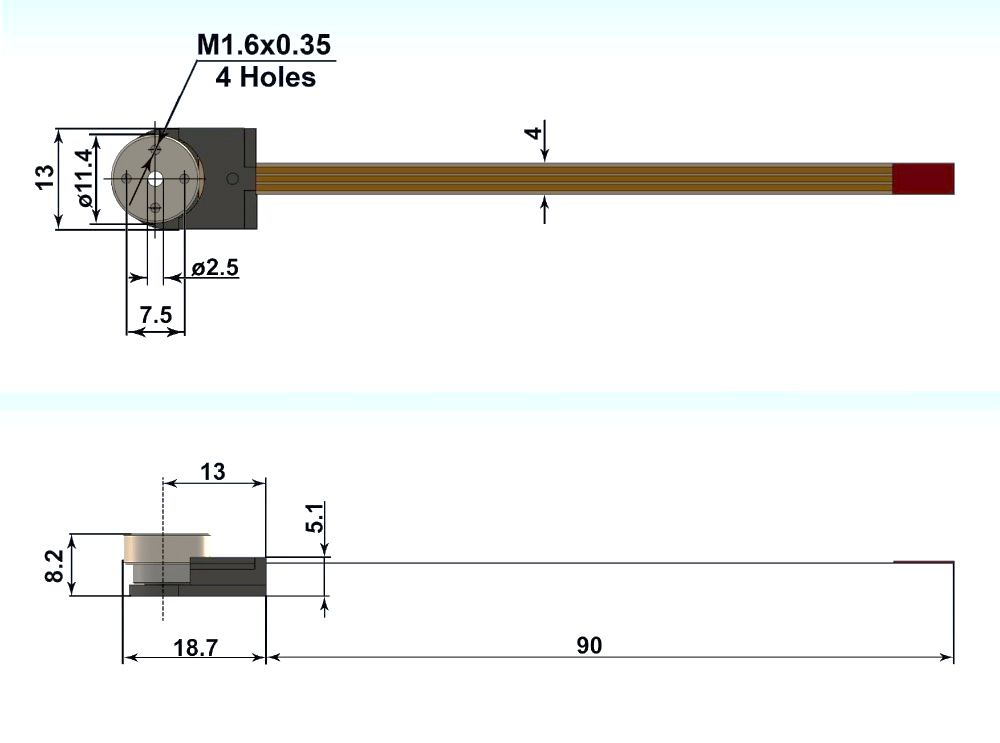
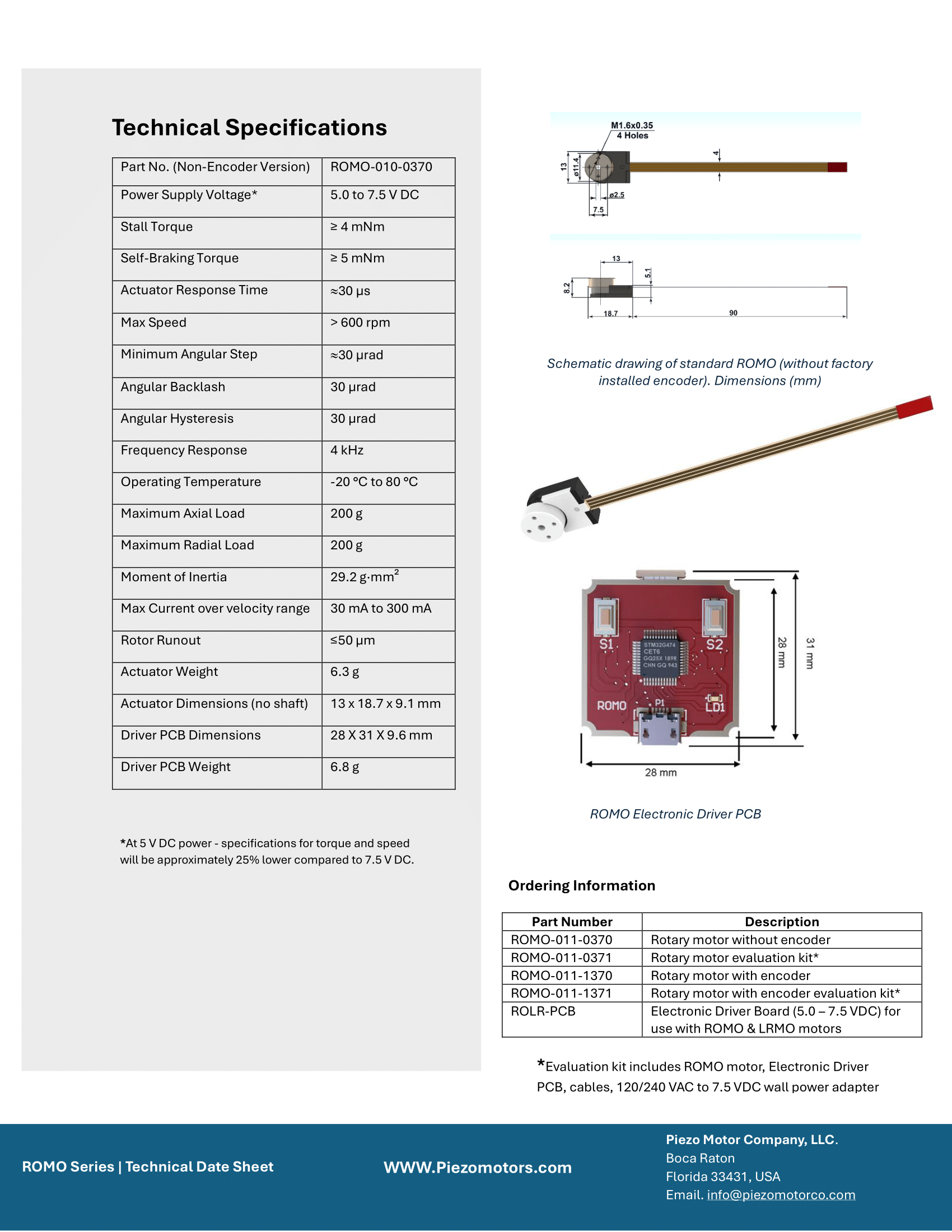
Technical Specifications
|
[video_player file=”https://piezomotors.com/wp-content/uploads/2024/09/ROMO-motion.mp4″]
[video_player file=”https://piezomotors.com/wp-content/uploads/2024/09/ROMO-360.mp4″]

ROMO Step file
ROMO-Web Step File
| Quantity | 1-5, 6-25, 25-100, 100-500 |
|---|---|
| Part Number | ROMO-011-0370 |
Related products
-
ROMO
ROMO-KIT
$173.25 – $356.91 Add to Cart This product has multiple variants. The options may be chosen on the product page -
ROMO
ROMO-E
$130.18 – $268.18 Add to Cart This product has multiple variants. The options may be chosen on the product page -
ROMO
ROMO-E-KIT
$185.09 – $381.30 Add to Cart This product has multiple variants. The options may be chosen on the product page -
ROMO
ROMO-E-CL
$186.31 – $383.81 Add to Cart This product has multiple variants. The options may be chosen on the product page