Rotary Piezomotor ROMO-LG Series
Piezo Motor Company’s novel series of rotary piezoelectric motors represent a quantum leap in the design and construction of compact, high-precision performance rotary motor technologies. Manufactured from modern lightweight, reinforced thermoplastics, this new range of rotary motors combine superior angular precision and ultrafast response.

Motion Control Options
Piezo Motor Company’s rotary motors are available with or without factory-fitted encoders. Fully closed-loop systems are also available:Motion control is achieved using the electronic driver board, designed to offer an economical interface for user control.
Electronic Driver Board Interface Supports UART & I2C
The driver PCB supports UART and I2C interfaces, enhancing its adaptability. Each board is pre-programmed for the specific motor model, allowing for software configurability, optimizing drive signals, and integrating controls. Motor operation can be finely regulated by user through closed- loop control with an optional encoder installed on the motor/actuator.
Closed-loop Systems with Python API
PMC’s new Python API allows for feedback from the piezomotors’ encoder to be fed to the driver board, closing the loop. The position and speed of the motor can be controlled through an elaborate set of Python API commands, accessible via the MicroUSB port.
Performance and Benefits of ROMO-LG Series Rotary Motors
1,000 TIMES GREATER PRECISION
While most stepper motors have a maximum of 400 steps per revolution, a Piezo Motor Company rotary piezo motor has ~625,000 steps in a single rotation with each at full torque, stepping in <10 µrad increments.
FORM FACTOR
Our piezo resonator design allows for a low profile Z-height for our rotary motors.
FAST RESPONSE
Within 30 µs to 50 µs, the piezo motor has made its first step and motion has commenced, compared to a stepper motor with a typical 15 to 20 ms to start motion.
ZERO POWER TO HOLD
Piezo Motor Company’s rotary motors consume zero power at holding torque and very low power at slow speed (0.1 W at 1 RPM); yielding the possibility of very efficient overall duty.
SPECIAL PROPERTIES
Piezo Motor Company motors are immune to EMI and RF interference and have no emissions, making them ideal for a range of sensitive applications. For specialized applications (including MRI) please contact our technical team.
LIGHTWEIGHT
Piezo Motor Company motors contain no copper windings, magnets, or ferrous laminations making them ideally suited to weight-critical applications. Our motor housings are lightweight, reinforced thermoplastic, and they will operate at ultrasonic frequencies, making them virtually silent.
RELIABLE
Our reduced part count means fewer failures. With no bi-material joints to delaminate or multilayer stack joints to crack, there is no susceptibility to moisture or shorting.
ROMO-LG Series Motor Specifications
| Specification | Standard | Encoder |
|---|---|---|
| Mode of Operation | Stepping & Continuous | Stepping & Continuous |
| Encoder Type | N/A | Optical |
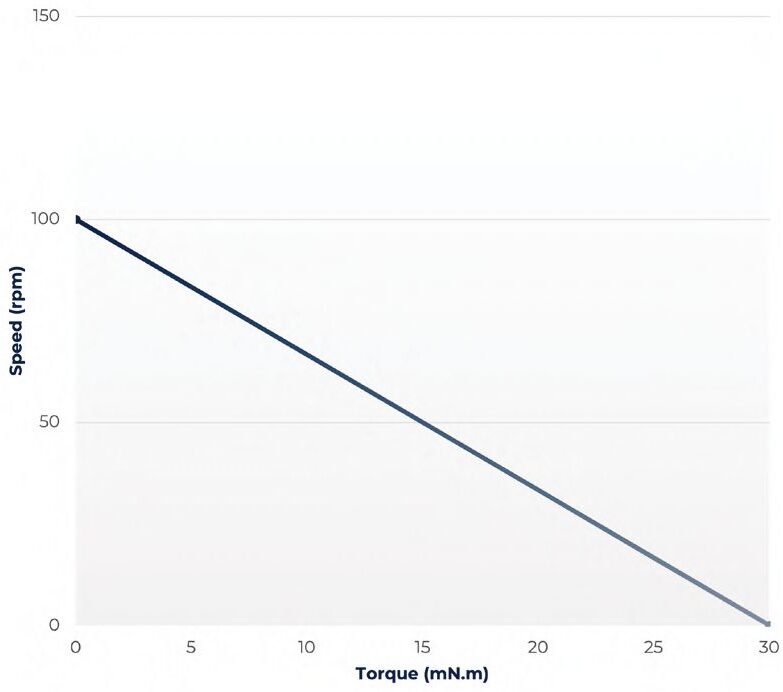
| Maximum Torque | >30 mN.M | >30 mN.M |
| Self-Braking Torque | >40 mN.M | >40 mN.M |
| Response Time | 30-50 µsec | 30-50 µsec |
| Maximum Speed | >100 rpm | >100 rpm |
| Minimum Angular Step | <10 µrad | <10 µrad |
| Min. Controlled Angular Step | N/A | 196 µrad |
| Uni-Directional Repeatability | N/A | +/- 1 arc-min |
| Dynamic Range | 4 kHz | 4 kHz |
| Angular Hysteresis of Rotational Axis at Direction | <10 µrad | <10 µrad |
| Supply Voltage for Driver | 12 VDC | 12 VDC |
| Max Current Over Velocity Range | 350 mA | 350 mA Note 1 |
| Operating Temperature | -20 to 80 °C | -20 to 80 °C |
| Motor Weight | 69 g | 85.5 g Note 2 |
| Motor Dimensions | 66x52x20 mm | 66x52x31 mm |
| Driver PCB Dimensions | 48x63x15 mm | 48x63x15 mm |
| Control | PWM | PWM and/or Closed Loop |
Note 1: Maximum current in continous mode. Use of PWM with different duty cycle will proportionally reduce average current.
Note 2: Weight for solid shaft: Standard: (85.5 g) Encoder: (93.6 g)
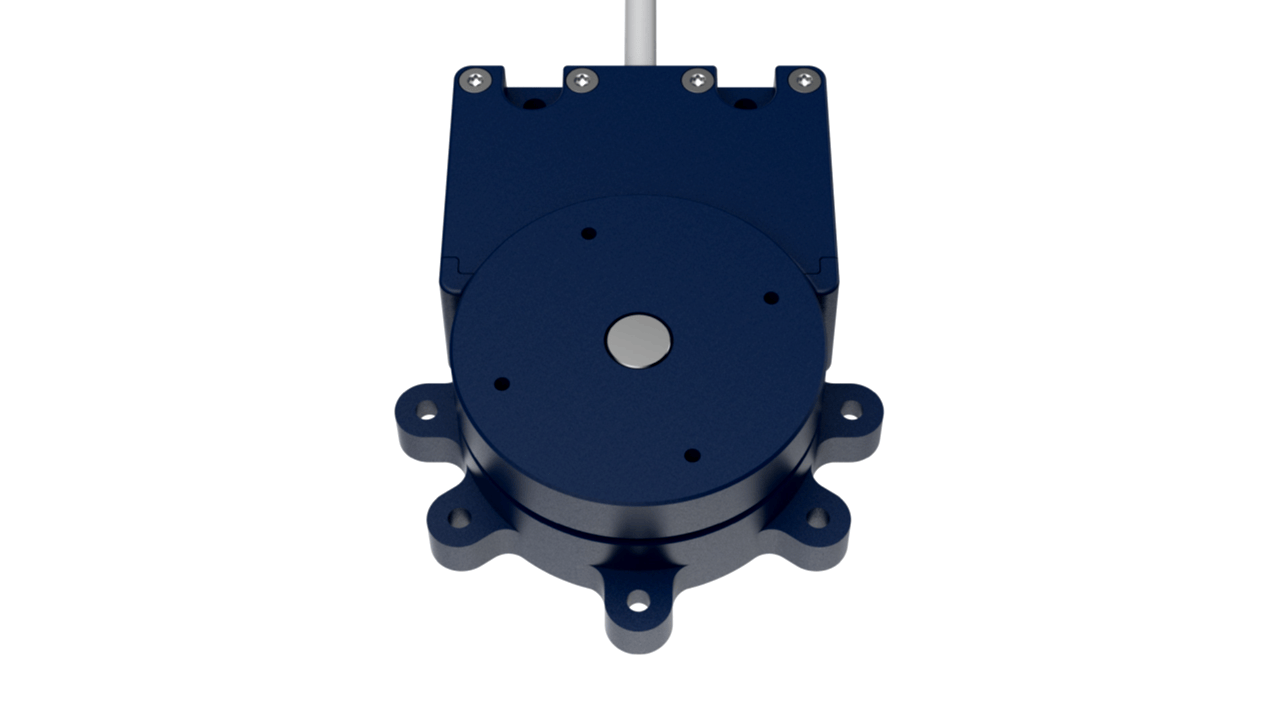
ROMO-LG Series Rotary Motor Solid Shaft
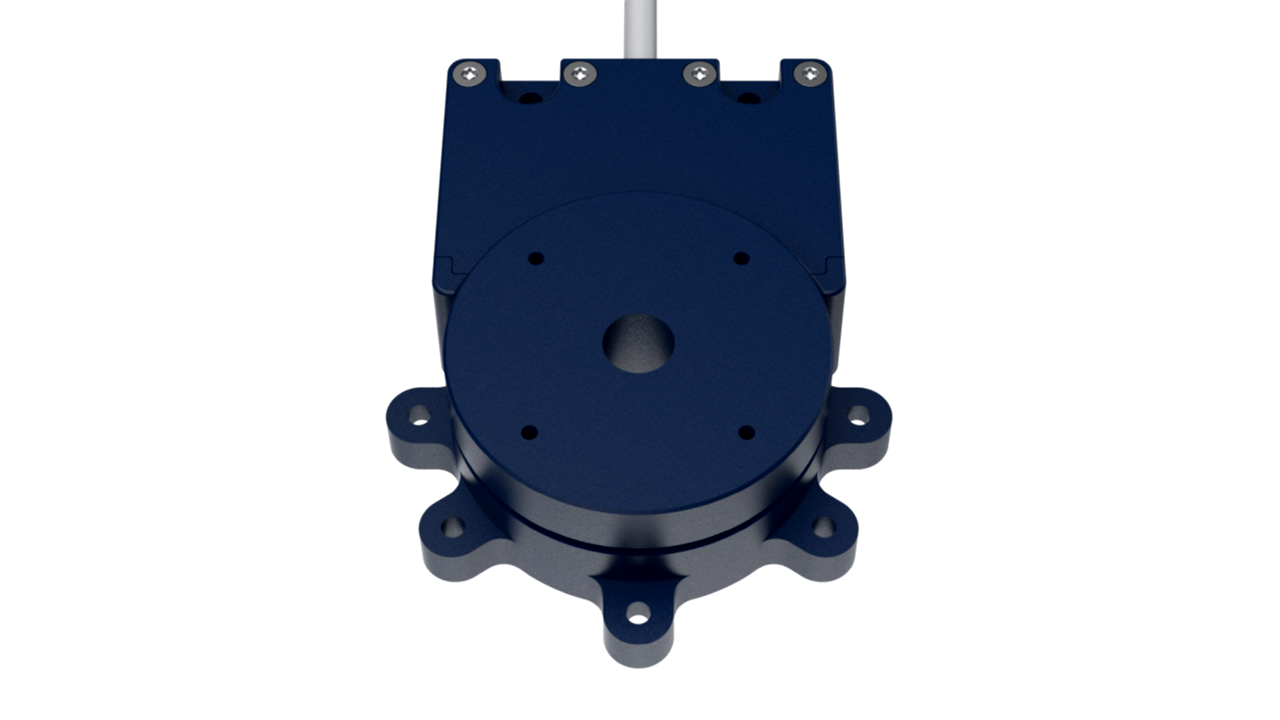
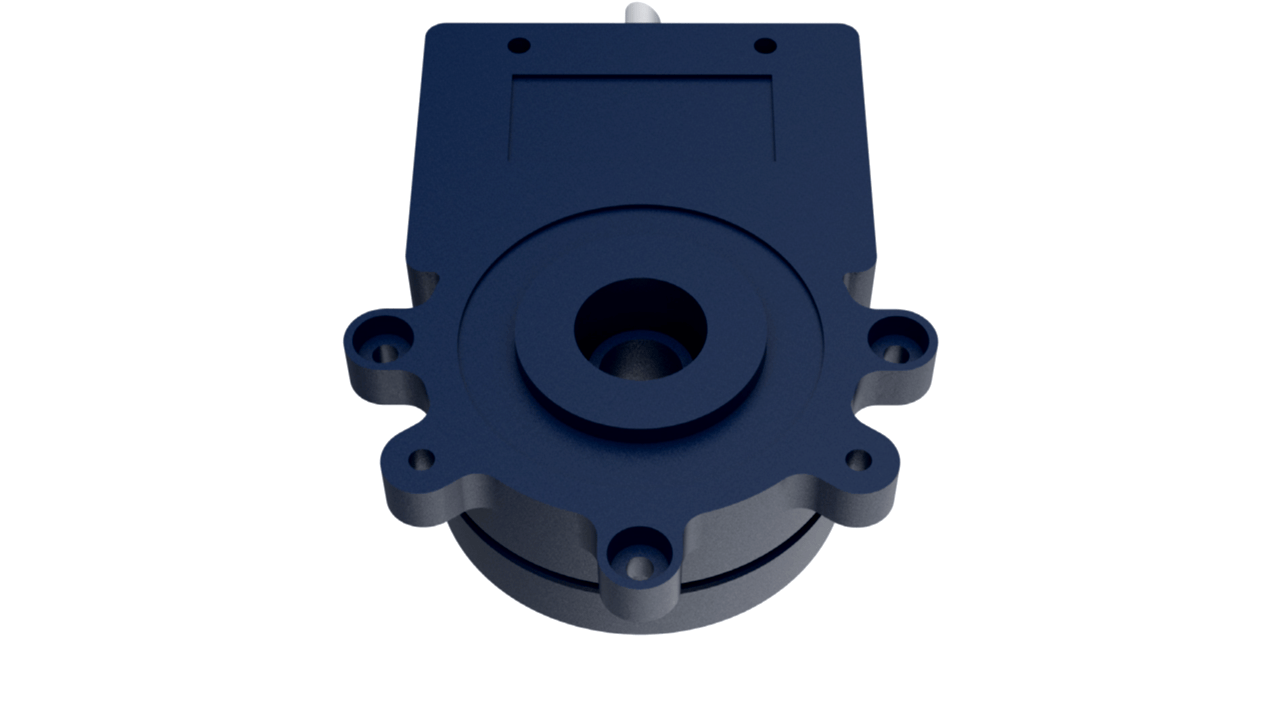
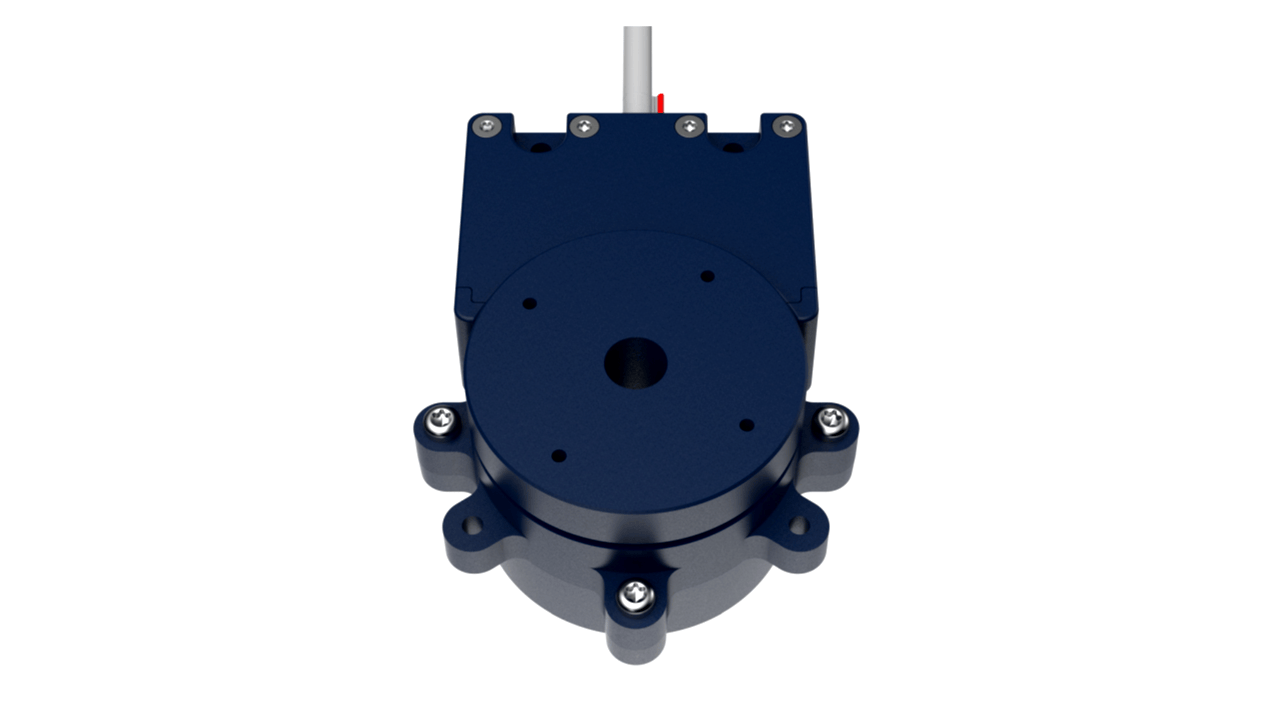
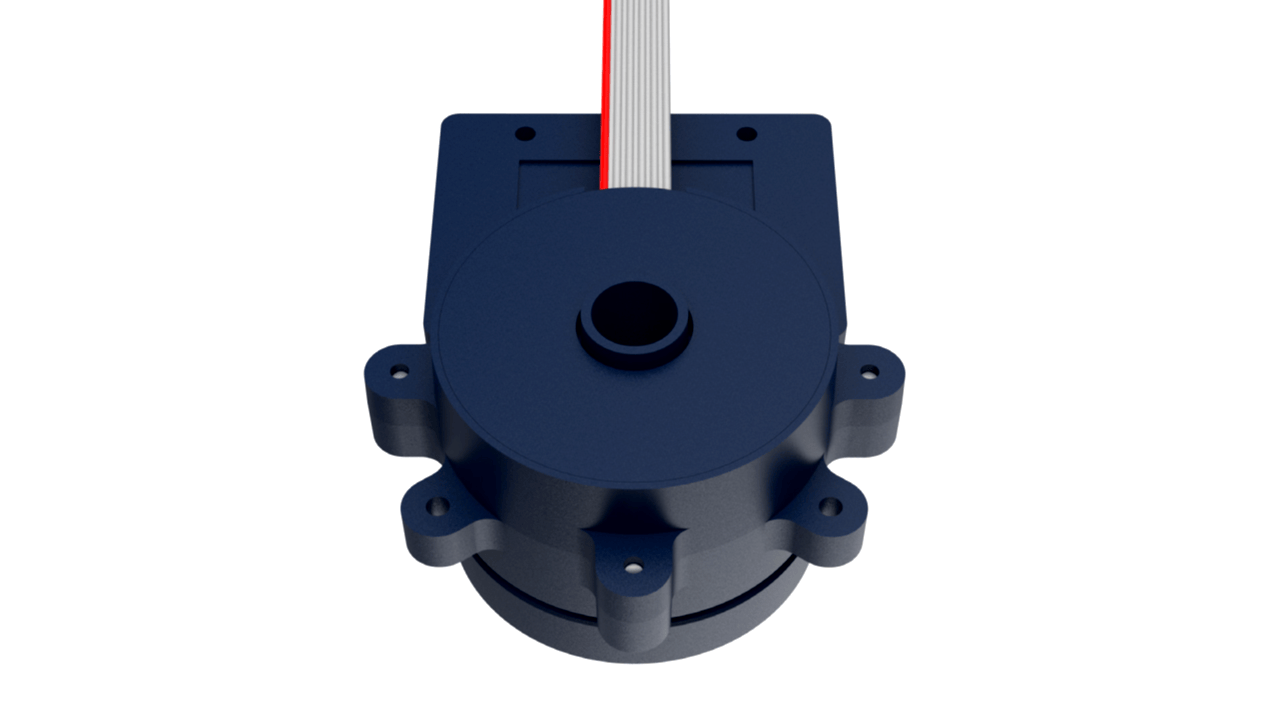
Principle of operation
Piezo Motor Company’s rotary piezo motors work on a principle of excitation of ultrasonic standing waves within a piezoelectric resonator. Piezo Motor Company’s electronic drivers have been designed to provide an economical user-control interface. Each driver PCB is pre-programmed for the specific motor model and is software configurable to provide optimization of drive signals and integrated controls. Closed-loop control of the motor is achieved via an encoder mounted on the motor.
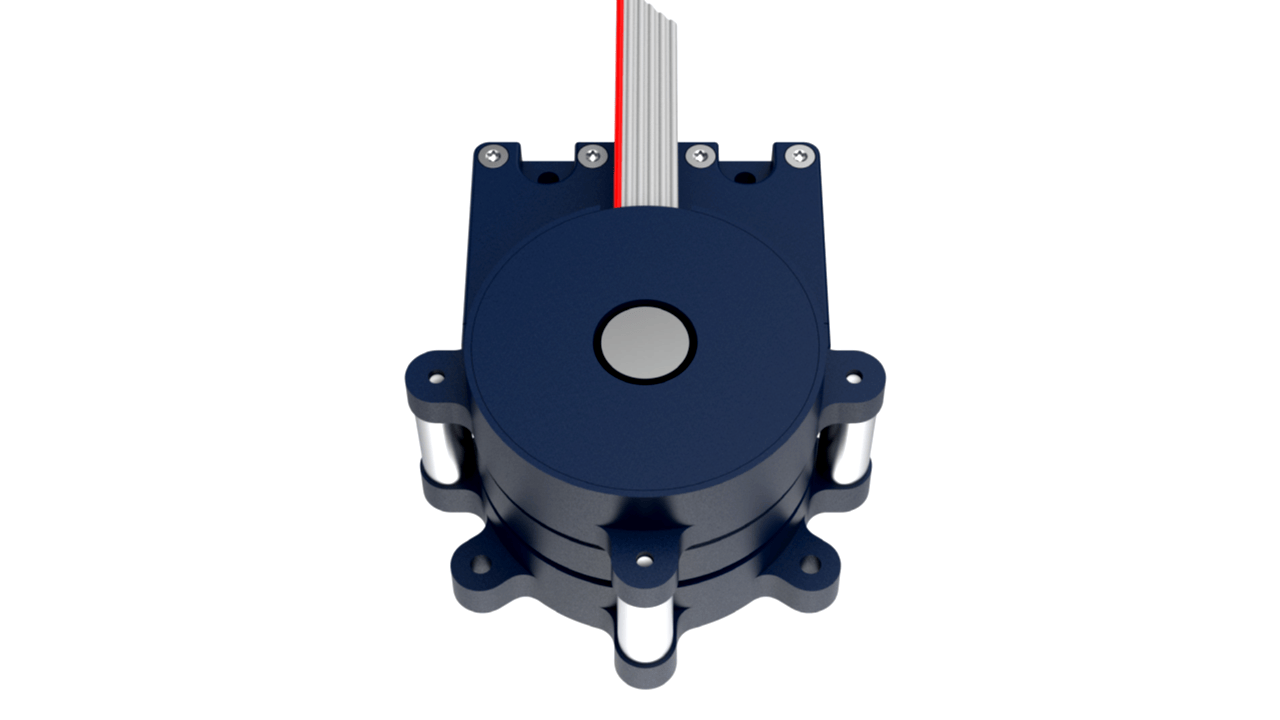
ROMO-LG Series Hollow Shaft dimensional drawings
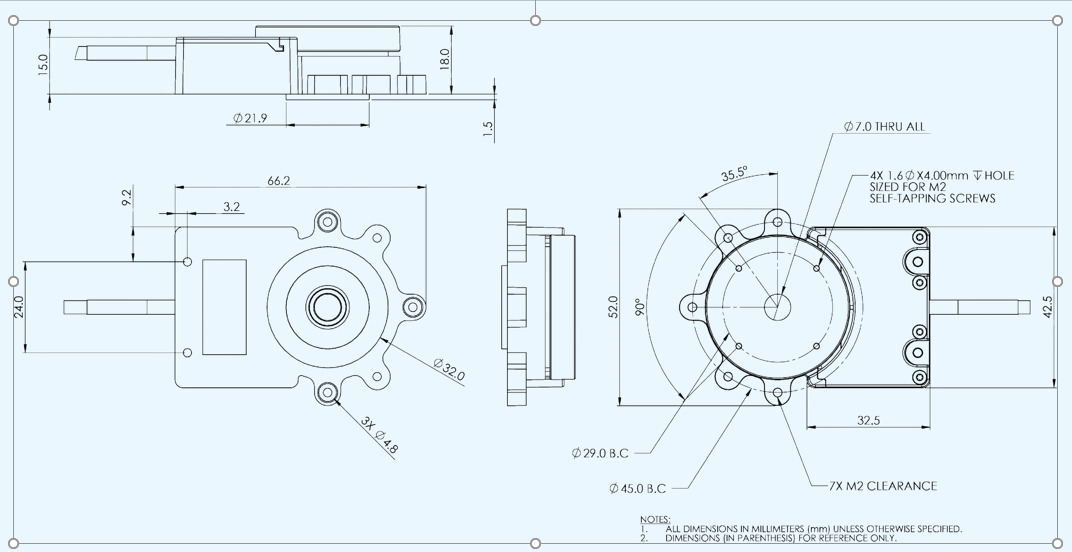
STANDARD MODEL
ENCODER MODEL
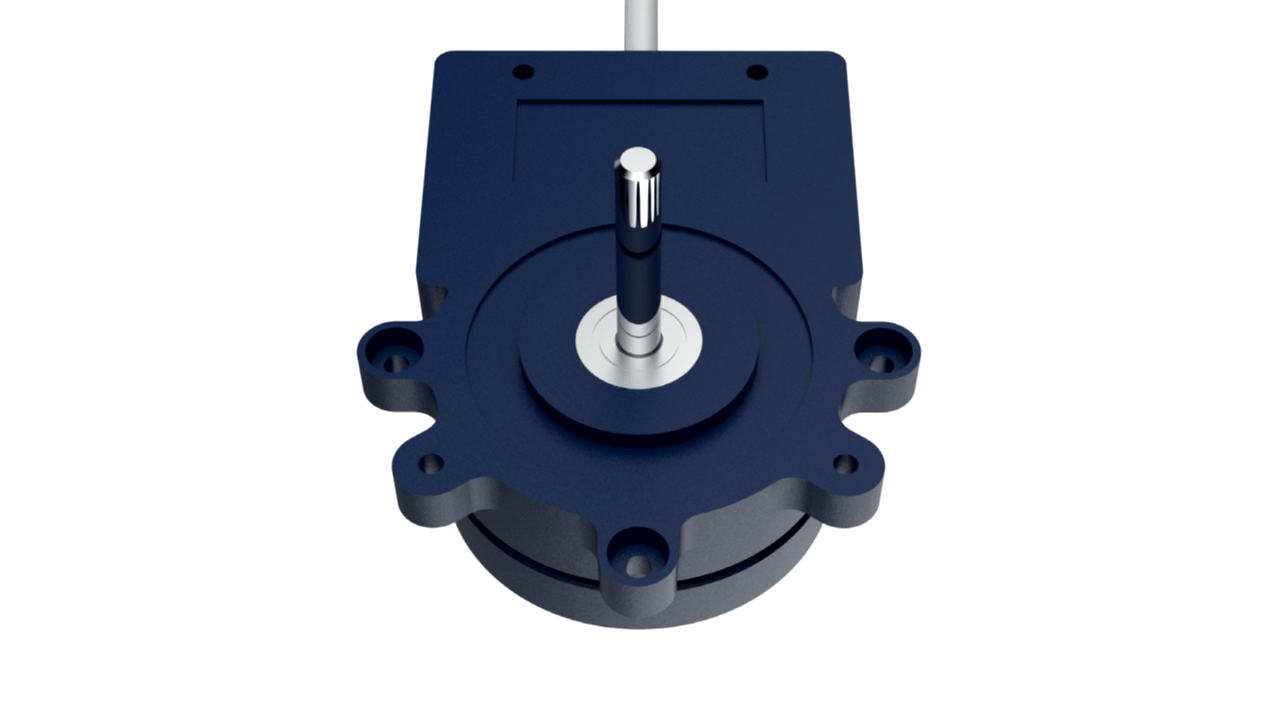
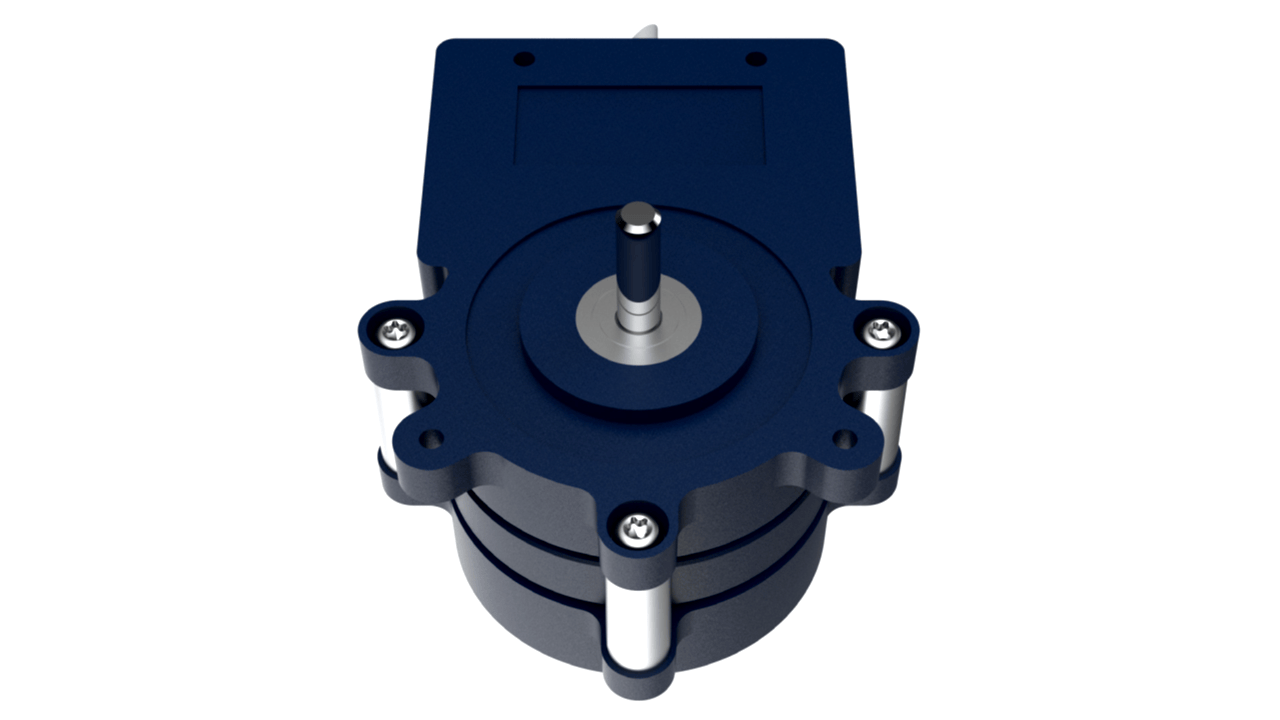
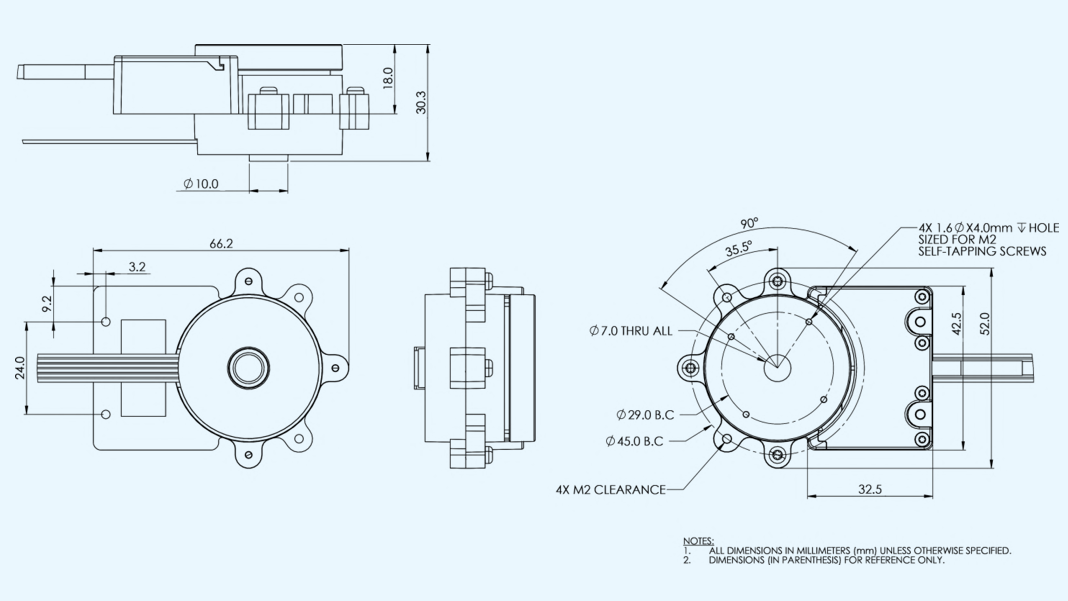
ROMO-LG Series Solid Shaft dimensional drawings
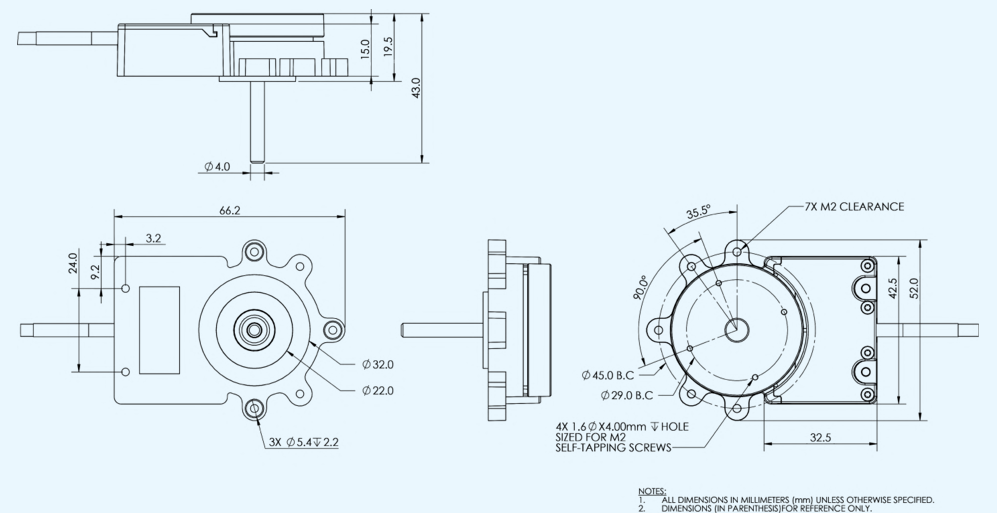
STANDARD MODEL
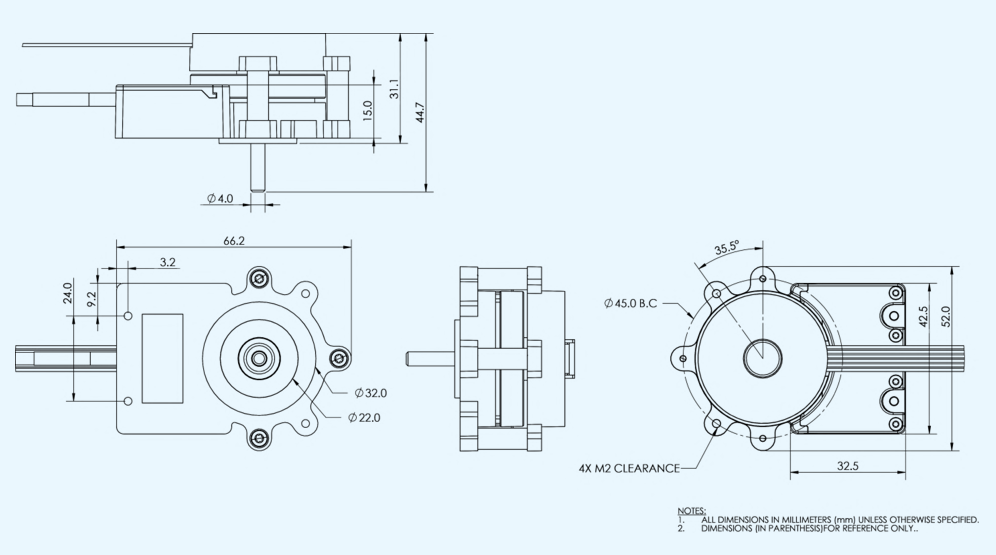
ENCODER MODEL
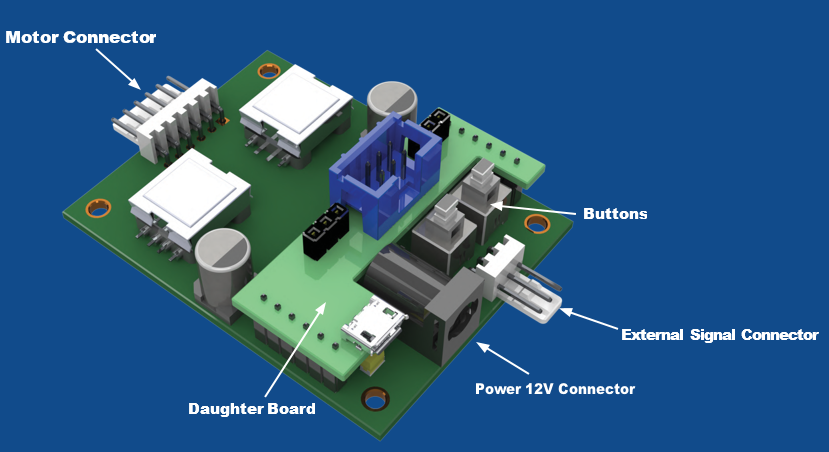
Motor control
The control of the ROMO-LG Series Rotary Motor is straightforward, each motor requires a driver board. This board will convert desired motion input instructions to the necessary electrical processes using specific frequency and amplitude values. This creates excitation of the piezo resonator and makes the motor perform the desired motion. For motors with an encoder, a daughter board is attached to the driver board to provide both closed-loop feedback as well as serial interfacing for external programming capabilities via Piezo Motor Company’s software or serial commands.
OPEN LOOP
The driver board can be controlled using an external signal source PWM (Pulse Width Modulation) mode. Control signals are applied to the External Signal Connector to generate the desired rotation and speed. Control of speed using PWM is implemented by varying the pulse duration and repetition rate of input signals onto the two directional control pins. Size of step is determined by the pulse duration, and speed is determined by pulse rate. The minimum pulse duration is approximately 30 µs.
CLOSED-LOOP
Pre-programmed motion control algorithms enable the implementation of several commands for specific motion control. The key commands are for defining the speed and the movement to a defined position. These commands are resident within a library which can be accessed using either Piezo Motor Company’s control software or via the serial port using TTL serial commands. Motor Control can also be implemented with Python commands using Piezo Motor Company’s Motor API.
Electronic PCB Driver for ROMO-LG Series Piezo Motors
ELECTRONIC DRIVERS
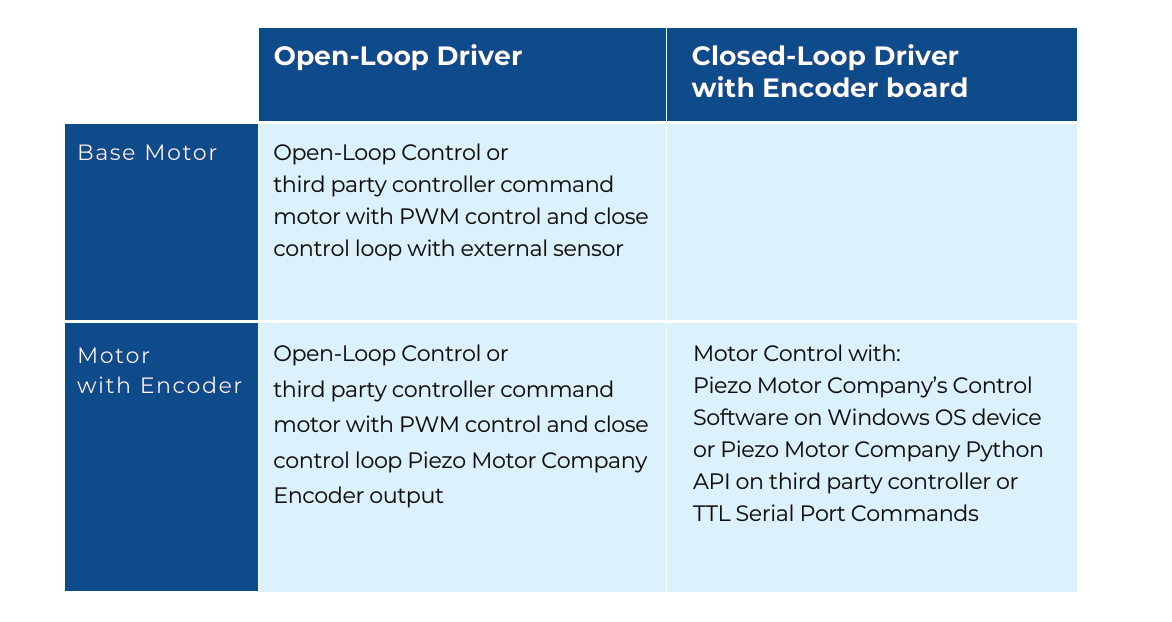
Control architecture & options
Piezo Motor Company motors are available as a basic motor or with a fitted encoder. Piezo Motor Company electronic drivers are available as open-loop or closed-loop drivers which are fitted with an encoder daughter board. Motors can be simply controlled in open-loop mode with several options for achieving closed-loop motion control. To learn more, visit https://piezomotors.com
DRIVER BOARDS ROMO-LG & LRMO-LG SERIES

Performance Chart and Motor/Driver Part Configurations
| Motor Type | HOLLOW SHAFT | HOLLOW SHAFT | SOLID SHAFT | SOLID SHAFT |
| Model | ROMO-HS-LG | ROMO-HS-E-LG | ROMO-SS-LG | ROMO-SS-E-LG |
| Part Number | ROMO-011-0380 | ROMO-011-1380 | ROMO-011-0390 | ROMO-011-1390 |
| Encoder | without encoder | with Optical Encoder | without encoder | with Optical Encoder |
| Rotor/Shaft | Metal Rotor | Metal Rotor | Metal Rotor/shaft | Metal Rotor/shaft |
| Enclosure | Plastic Enclosure | Plastic Enclosure | Plastic Enclosure | Plastic Enclosure |
| Torque (mN.m) | >30.0 | >30.0 | >30.0 | >30.0 |
| Resolution | > 600,000 steps per rotation | > 600,000 steps per rotation | > 600,000 steps per rotation | > 600,000 steps per rotation |
| Max speed | >100 RPM | >100 RPM | >100 RPM | >100 RPM |
| Supply | 12 V DC | 12 V DC | 12 V DC | 12 V DC |
| Kit Ordering Number | ROMO-HS-LG-KIT | ROMO-HS-E-LG-KIT | ROMO-SS-LG-KIT | ROMO-SS-E-LG-KIT |
| Part | ROMO-011-0381 | ROMO-011-1381 | ROMO-011-0391 | ROMO-011-1391 |
| Supply | 110/240 VAC to 12 V DC power adapter, cables | 110/240 VAC to 12 V DC power adapter, cables | 110/240 VAC to 12 V DC power adapter, cables | 110/240 V AC to 12 V DC power adapter, cables |
| Includes | Hollow-Shaft Motor without encoder | Hollow-Shaft Motor with optical encoder | Solid-Shaft Motor without encoder | Solid-Shaft Motor with Encoder |
ROMO-LG Series ordering Information
| Model | P/N | Description | Technical Specifications |
| ROMO-HS-LG | ROMO-011-0380 | Rotary Piezo Motor, Hollow-Shaft, without encoder, Metal Rotor, Plastic Enclosure – Torque: >30.0 mN.m, Resolution: > 600,000 steps per rotation, Max Speed: >100 RPM, 12 V DC. | Power Supply Voltage 12.0 V DC Stall Torque ≥ 40 mNm Self-Braking Torque ≥ 30mNm Actuator Response Time < 30 µs Max Speed > 100 rpm Minimum Angular Step 10 µrad Angular Backlash 10 µrad Angular Hysteresis 10 µrad Frequency Response 4 kHz Operating Temperature -20 °C to 80 °C Current over velocity range 30 mA to 350 mA Actuator Weight 69 g Actuator Dimensions 66 x 52 x 20 mm |
| ROMO-HS-LG-KIT | ROMO-011-0381 | Rotary Piezo Motor Evaluation Kit, Includes; Hollow-Shaft Motor without encoder, Metal Rotor, Plastic Enclosure – Torque: >30.0 mN.m, Resolution: > 600,000 steps per rotation, Max Speed: >100 RPM, 110/240 VAC to 12 V DC power adapter, cables. | Power Supply Voltage 12.0 V DC Stall Torque ≥ 40 mNm Self-Braking Torque ≥ 30mNm Actuator Response Time < 30 µs Max Speed > 100 rpm Minimum Angular Step 10 µrad Angular Backlash 10 µrad Angular Hysteresis 10 µrad Frequency Response 4 kHz Operating Temperature -20 °C to 80 °C Current over velocity range 30 mA to 350 mA Actuator Weight 69 g Actuator Dimensions 66 x 52 x 20 mm |
| ROMO-HS-E-LG | ROMO-011-1380 | Rotary Piezo Motor, Hollow-Shaft, with Optical Encoder, Metal Rotor, Plastic Enclosure – Torque: >30.0 mN.m, Resolution: > 600,000 steps per rotation, Max Speed: >100 RPM, 12 V DC. | Power Supply Voltage 12.0 V DC Stall Torque ≥ 40 mNm Self-Braking Torque ≥ 30mNm Actuator Response Time < 30 µs Max Speed > 100 rpm Minimum Angular Step 10 µrad (Minimum Encoder Controlled Angular Step 196 µRad) Angular Backlash 10 µrad Angular Hysteresis 10 µrad Frequency Response 4 kHz Operating Temperature -20 °C to 80 °C Current over velocity range 30 mA to 350 mA Actuator Weight 85.5g Actuator Dimensions 66 x 52 x 31 mm |
| ROMO-HS-E-LG-KIT | ROMO-011-1381 | Rotary Piezo Motor Evaluation Kit, Includes; Hollow-Shaft Motor with optical encoder, Metal Rotor, Plastic Enclosure – Torque: >30.0 mN.m, Resolution: > 600,000 steps per rotation, Max Speed: >100 RPM, 110/240 VAC to 12 V DC power adapter, cables. | Power Supply Voltage 12.0 V DC Stall Torque ≥ 40 mNm Self-Braking Torque ≥ 30mNm Actuator Response Time < 30 µs Max Speed > 100 rpm Minimum Angular Step 10 µrad Minimum Encoder Controlled Angular Step 196 µRad Angular Backlash 10 µrad Angular Hysteresis 10 µrad Frequency Response 4 kHz Operating Temperature -20 °C to 80 °C Current over velocity range 30 mA to 350 mA Actuator Weight 85.5g Actuator Dimensions 66 x 52 x 31 mm |
| ROMO-SS-LG | ROMO-011-0390 | Rotary Piezo Motor, Solid-Shaft, without encoder, Metal Rotor/shaft, Plastic Enclosure – Torque: >30.0 mN.m, Resolution: > 600,000 steps per rotation, Max Speed: >100 RPM, 12 V DC. | Power Supply Voltage 12.0 V DC Stall Torque ≥ 40 mNm Self-Braking Torque ≥ 30mNm Actuator Response Time < 30 µs Max Speed > 100 rpm Minimum Angular Step 10 µrad Angular Backlash 10 µrad Angular Hysteresis 10 µrad Frequency Response 4 kHz Operating Temperature -20 °C to 80 °C Current over velocity range 30 mA to 350 mA Actuator Weight 85.5 g Actuator Dimensions 66 x 52 x 20 mm |
| ROMO-SS-LG-KIT | ROMO-011-0391 | Rotary Piezo Motor Evaluation Kit, Includes; Solid-Shaft, without encoder, Metal Rotor/shaft, Plastic Enclosure – Torque: >30.0 mN.m, Resolution: > 600,000 steps per rotation, Max Speed: >100 RPM, 110/240 VAC to 12 V DC power adapter, cables. | Power Supply Voltage 12.0 V DC Stall Torque ≥ 40 mNm Self-Braking Torque ≥ 30mNm Actuator Response Time < 30 µs Max Speed > 100 rpm Minimum Angular Step 10 µrad Angular Backlash 10 µrad Angular Hysteresis 10 µrad Frequency Response 4 kHz Operating Temperature -20 °C to 80 °C Current over velocity range 30 mA to 350 mA Actuator Weight 85.5 g Actuator Dimensions 66 x 52 x 20 mm |
| ROMO-SS-E-LG | ROMO-011-1390 | Rotary Piezo Motor, Solid-Shaft, with Encoder, Metal Rotor/shaft, Plastic Enclosure – Torque: >30.0 mN.m, Resolution: > 600,000 steps per rotation, Max Speed: >100 RPM, 12 V DC. | Power Supply Voltage 12.0 V DC Stall Torque ≥ 40 mNm Self-Braking Torque ≥ 30mNm Actuator Response Time < 30 µs Max Speed > 100 rpm Minimum Angular Step 10 µrad Angular Backlash 10 µrad Angular Hysteresis 10 µrad Frequency Response 4 kHz Operating Temperature -20 °C to 80 °C Current over velocity range 30 mA to 350 mA Actuator Weight 93.6 g Actuator Dimensions 66 x 52 x 20 mm |
| ROMO-SS-E-LG-KIT | ROMO-011-1391 | Rotary Piezo Motor Evaluation Kit, Includes: Motor with Encoder, Metal Rotor/shaft, Plastic Enclosure – Torque: >30.0 mN.m, Resolution: > 600,000 steps per rotation, Max Speed: >100 RPM, 110/240 V AC to 12 V DC power adapter, cables. | Power Supply Voltage 12.0 V DC Stall Torque ≥ 40 mNm Self-Braking Torque ≥ 30mNm Actuator Response Time < 30 µs Max Speed > 100 rpm Minimum Angular Step 10 µrad Angular Backlash 10 µrad Angular Hysteresis 10 µrad Frequency Response 4 kHz Operating Temperature -20 °C to 80 °C Current over velocity range 30 mA to 350 mA Actuator Weight 93.6 g Actuator Dimensions 66 x 52 x 20 mm |
Driver Boards ROMO-LG & LRMO-LG Series
ROLR-LG-PCB | ROLR-LG-PCB | Standard 12 VDC Driver board for ROMO-LG and LRMO-LG | Standard 12 VDC Driver board for ROMO-LG and LRMO-LG |
ROLR-LG-CL-PCB | ROLR-LG-CL-PCB | Close-Loop Driver PCB 12 VDC for use with ROMO-E-LG and LRMO-E-LG | Close-Loop Driver PCB 12 VDC for use with ROMO-E-LG and LRMO-E-LG |